
Hacking Hex Bug Spiders

Upon examining the transmitter PCB, exposed test points for the forward, backward, left, and right switches were identified, allowing for easy wire attachment. The A/B switch was also accessible for soldering, but the battery terminals were covered in hot melt glue, complicating access. Seven wires were successfully attached to the PCB and routed through the A/B switch hole before reassembly. The functions of the test points were labeled as GND, Forward, +3.3V, Backward, with the A/B code located below the left function, and Right. Although some individuals connect Arduinos directly to the transmitter inputs, a potential divider was employed to prevent the 5V logic of the Arduino from interfacing directly with the 3.3V logic of the AT8EB microcontroller. This setup was integrated into an Arduino shield, with the modified transmitter affixed to a strip board using hot melt glue, enabling control of two spiders via an Arduino connected to a laptop. The laptop runs a Java program that communicates with the Arduino through a USB connection, issuing single-character commands to dictate the robot's state—forward, backward, rotate left, rotate right, or stop—for both spiders based on the A/B code.
A one-second delay is necessary after establishing the serial port connection before sending commands to avoid command loss. While this multiplexing method allows control of two spiders from a single transmitter, it is suggested that two HexBug Arduino shields would enhance functionality. Through experimentation, it was determined that maintaining the TX pins in spider A's state for 80 ms, followed by a similar duration for spider B, yields reliable simultaneous control. As the project has progressed to utilize a webcam for spider positioning, issues have arisen with A/B code multiplexing. The next phase will focus on enabling the spider to follow a colored marker, which requires disabling the A/B code multiplexing on the Arduino for improved reliability.
The project exemplifies the integration of microcontroller technology, robotics, and software programming, showcasing a practical application of electronics in creating interactive and responsive robotic systems. The approach of modifying existing consumer electronics for educational and experimental purposes highlights the versatility and potential for innovation within the field of electronics engineering.For the Smart Cities exhibition in Leeds in a couple of weeks, we`ve been building a physical representation of an agent based simulation. Hex Bug Spiders are relatively cheap hexapod robots that are controlled via an infra-red transmitter which has an A or B code so that you can control two simultaneously.
The way it walks is referred to as the J amius walking mechanism after its inventor (see: ). After taking the Hex Bug apart the construction is actually really good for a cheap toy. Both the hand held transmitter and the receiver in the robot are based around the AT8EB one chip microcontroller (Alpha Microelectronics Corp), with the robot itself also containing an ST1155A H Bridge driver. I`ve seen a lot of blog posts about hacking these spiders, but after trying to modify the robot`s control PCB to attach wires to the H Bridge driver directly (as in this blog post: ), I`ve decided that it`s easier to replace all the electronics rather than hack the surface mount board.
Out of the three spiders that I have, I`ve left two robots untouched while the third one has been disassembled. The logic behind this is to modify the IR transmitter and control two via an Arduino attached to a computer, while adding a ZigBee radio to the third for wireless control.
After examining the transmitter PCB, I noticed that there are exposed test points which can be used to attach wires for the forward, backward, left and right switches. I then discovered the following blog post doing almost exactly the same thing: The four test points for the forward, backward, left and right buttons are exposed, so it`s easy to solder on to them.
I did have to very carefully remove some of the tape covering the button clickers first though. The A/B switch is very easy to solder to, but the + and terminals from the battery are covered in hot melt glue which was very difficult to cut away. Then I had seven wires attached to the PCB which I routed through the A/B switch hole on the front case and re-assembled the transmitter.
Reading from left to right, the white arrows identify the functions as follows: GND, Forward, +3. 3V, Backward, (A/B code bottom with left above it), Right. I have seen people connect Arduinos directly to the inputs of these transmitters, but, as I wasn`t happy connecting the 5v logic of the Arduino to the 3. 3v logic of the AM8EB microprocessor, I used potential dividers on all the inputs. It`s never a good idea in microelectronics to have an input pin higher than Vss even if there are protection Zeners on the inputs.
I have built this into an Arduino shield with the modified transmitter stuck onto the strip board using hot melt glue. This allows me to control two spiders via an Arduino connected via USB to a laptop. The laptop is running a Java program which uses the USB connection as a serial port to send single character commands to the Arduino which set the robot state as forward, backward, rotate left, rotate right or stop for two spiders (via the A/B code).
What I`ve found is that there needs to be about a 1 second delay after bringing up the serial port before you start sending commands to the robots, otherwise you lose the commands. While this does work to control two spiders from one transmitter using multiplexing on the Arduino to flip between the A and B codes, I think you really need two HexBug Arduino shields for it to work.
By trial and error I found that holding the TX pins in spider A`s state for 80 ms, followed by the same for spider B, gave fairly reliable control of both simultaneously. Now that the project has progressed beyond the initial stages and we`re using a webcam to position the spider, this A/B code multiplexing is causing a lot of problems.
The next phase involves getting the spider to follow a coloured marker and the only way I could get this to work reliably was to disable the A/B code multiplexing on the Arduino. 🔗 External reference
Related Circuits
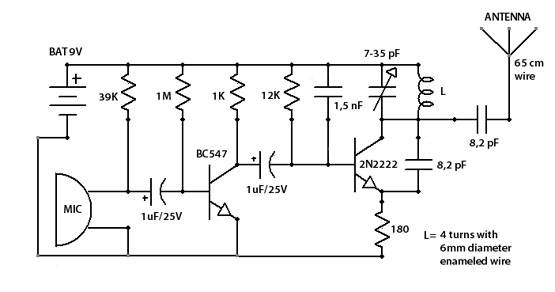
This simple-to-assemble FM transmitter can effectively transmit voice signals over an impressive range. By adjusting the trimmer, the signal can be heard on a nearby radio. The transmitter operates within a frequency range of 88-108 MHz and has a...
A number of simple FM devices, without the use of a crystal, demonstrate how power and frequency depend on various factors, including supply voltage and stage design. The oscillator stage of these transmitters is broadly termed "voltage dependent," as...
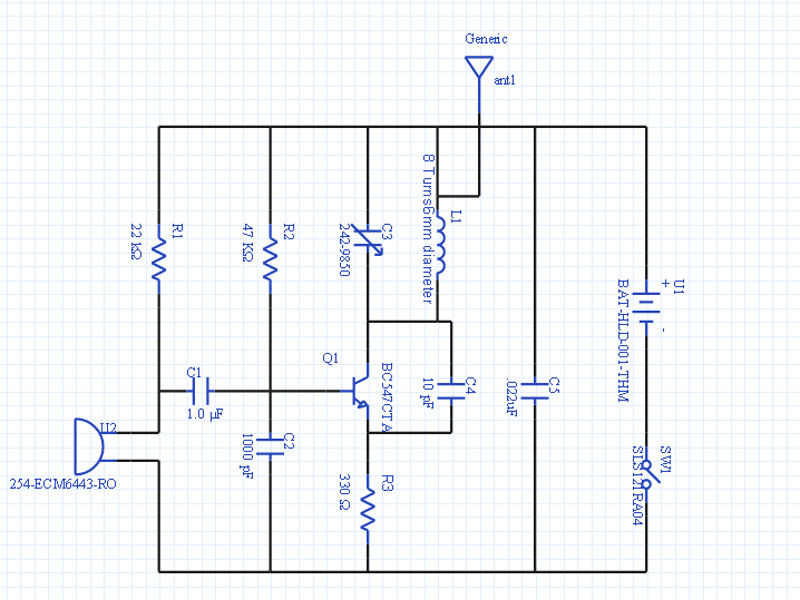
The schematic below illustrates a simple circuit that is straightforward to construct. One aspect that is not clearly represented in the schematic is the location of certain components. This circuit design comprises a basic arrangement of electronic components, typically including...
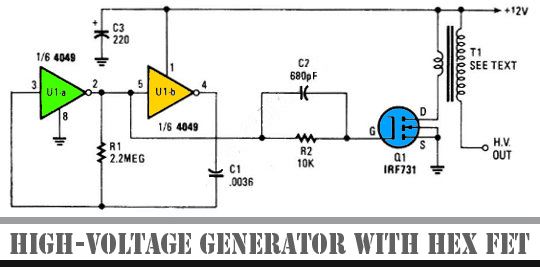
The schematic diagram below illustrates a high voltage generator circuit. This circuit employs a 4049 hex inverter configured as an oscillator, and it can utilize an ignition transformer from an automotive engine. A fly-back transformer may also be suitable....
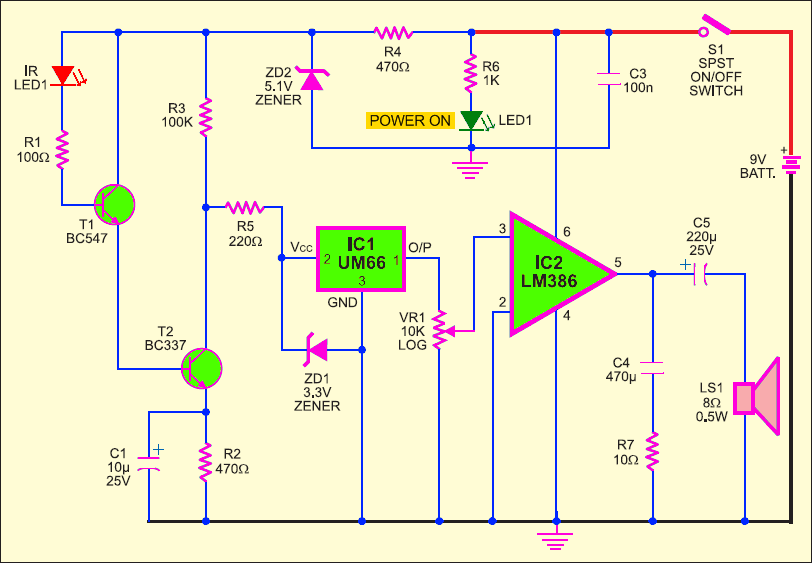
The amplified signal is sent to the melody generator through resistor R5. The output from the melody generator is directed to the LM386 low-power audio amplifier (IC2) via variable resistor VR1, which serves as the volume control. The loudspeaker...
This is just one of the many bugging devices available on the eavesdropping market. The range includes pen and pencil holders, trophies, framed pictures, and office furniture with false bottom drawers. These products are readily sold to fledgling companies,...