
Light Follower Robot
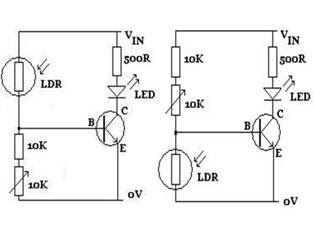
In a typical robotic system, the brain serves as the central controller that processes the information received from input devices, such as sensors, and generates commands for the output devices, like motors or actuators. Input devices can include a variety of sensors, such as ultrasonic sensors for distance measurement, infrared sensors for obstacle detection, and cameras for visual processing. These sensors collect data about the robot's surroundings, which is then transmitted to the brain for analysis.
The brain processes the incoming data using algorithms that dictate the robot's actions based on the information received. For example, if an ultrasonic sensor detects an object within a certain range, the brain may process this information to stop or change the direction of the robot to avoid a collision.
Output devices are responsible for executing the commands generated by the brain. Motors can be used to drive the wheels of a mobile robot, while servos may be employed for precise movements, such as in robotic arms. Additionally, LEDs or speakers can serve as indicators or communicators of the robot's status or actions.
The interaction between input and output devices is crucial for the robot's ability to perform tasks autonomously or semi-autonomously. The design of the circuit connecting these components must ensure that data can be transmitted efficiently and accurately, with considerations for power supply, signal integrity, and noise reduction.
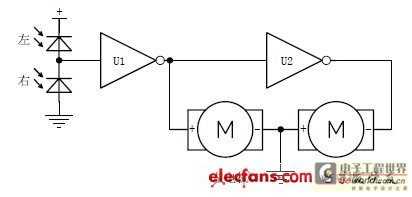
In summary, the architecture of a robotic system involves a synergistic relationship between its input sensors and output actuators, all governed by a central processing unit that interprets data and executes appropriate actions. This fundamental framework is applicable across various robotic applications, from simple hobbyist projects to complex industrial robots.The figures above shows the basic idea of any robot, where we have some inputs and output devices connected to the brain and some outputs controlled b.. 🔗 External reference
Related Circuits
This text introduces a system designed to facilitate smooth robotic operations using the 74HC240 integrated circuit. It emphasizes the implementation of low-cost technology that is accessible to everyone. The Schmitt trigger's threshold voltage is a critical aspect of the...

This circuit switch slowly on and off the internal lights in a car. The delaying time can be adjusted changing the values of the 10k, 4M7 resistors and capacitor. More: The BUZ74 can handle voltages of 500V, but you...

Approximately one month ago, an attempt was made to reverse engineer a low-cost LED color-changing light bulb. With assistance, the circuit has been mapped out, and control over the bulb has been established. However, several aspects of this device...
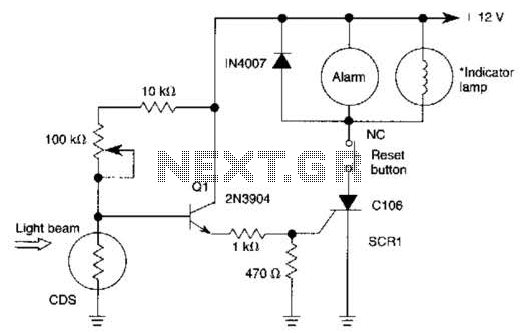
When the light beam that falls on the CDS photocell is interrupted, the transistor (EN3904) conducts, triggering SCR1 (CI06) and activating the alarm bell. SI resets the SCR. The alarm bell should be a self-interrupting electromechanical type. The lamp...
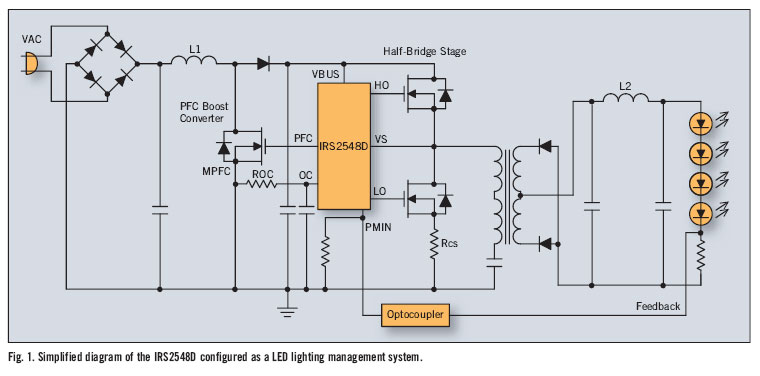
There is significant sensitivity to operating costs when managing high-powered commercial lighting. In these applications, there is a heightened focus on energy efficiency and AC line power factor, as these parameters influence operating expenses. Electric utilities impose additional charges...
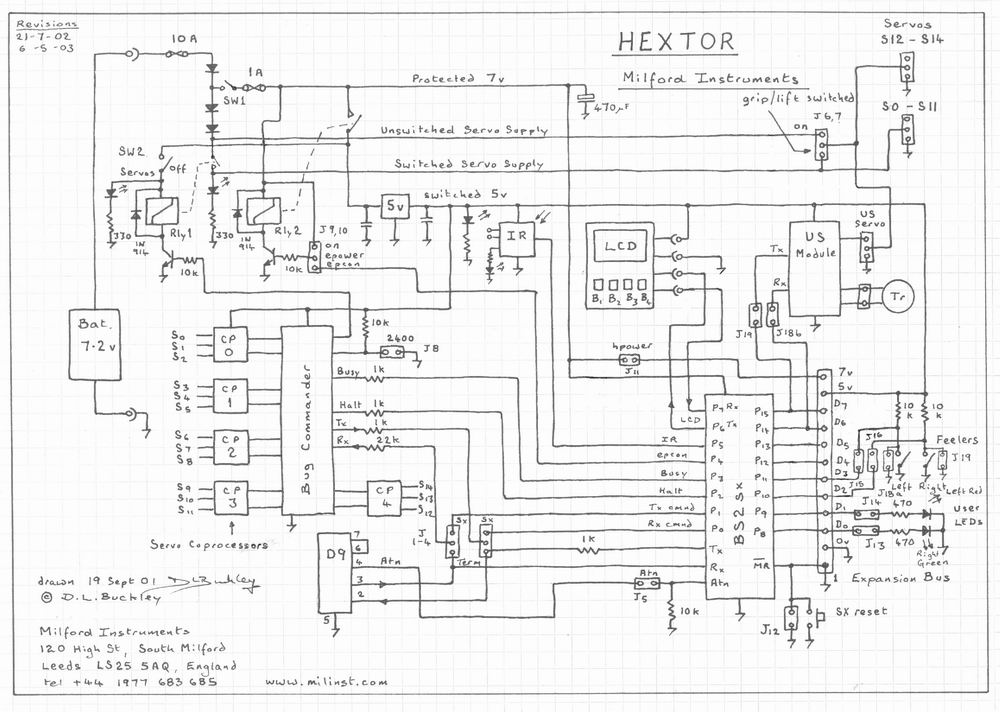
The circuit includes multiple connections for a BOS (Basic Operating System) processor. It has a serial connection for transmitting data to the BOS processor (pin 0) and receiving data from it (pin 1). Pin 2 is used to supply...