
Line Following Robot
Lectures on line following robots cover various aspects of designing and implementing robotic systems that can autonomously follow a designated path. The initial lectures introduce fundamental concepts, including the operational principles of line following robots and the importance of sensor integration.
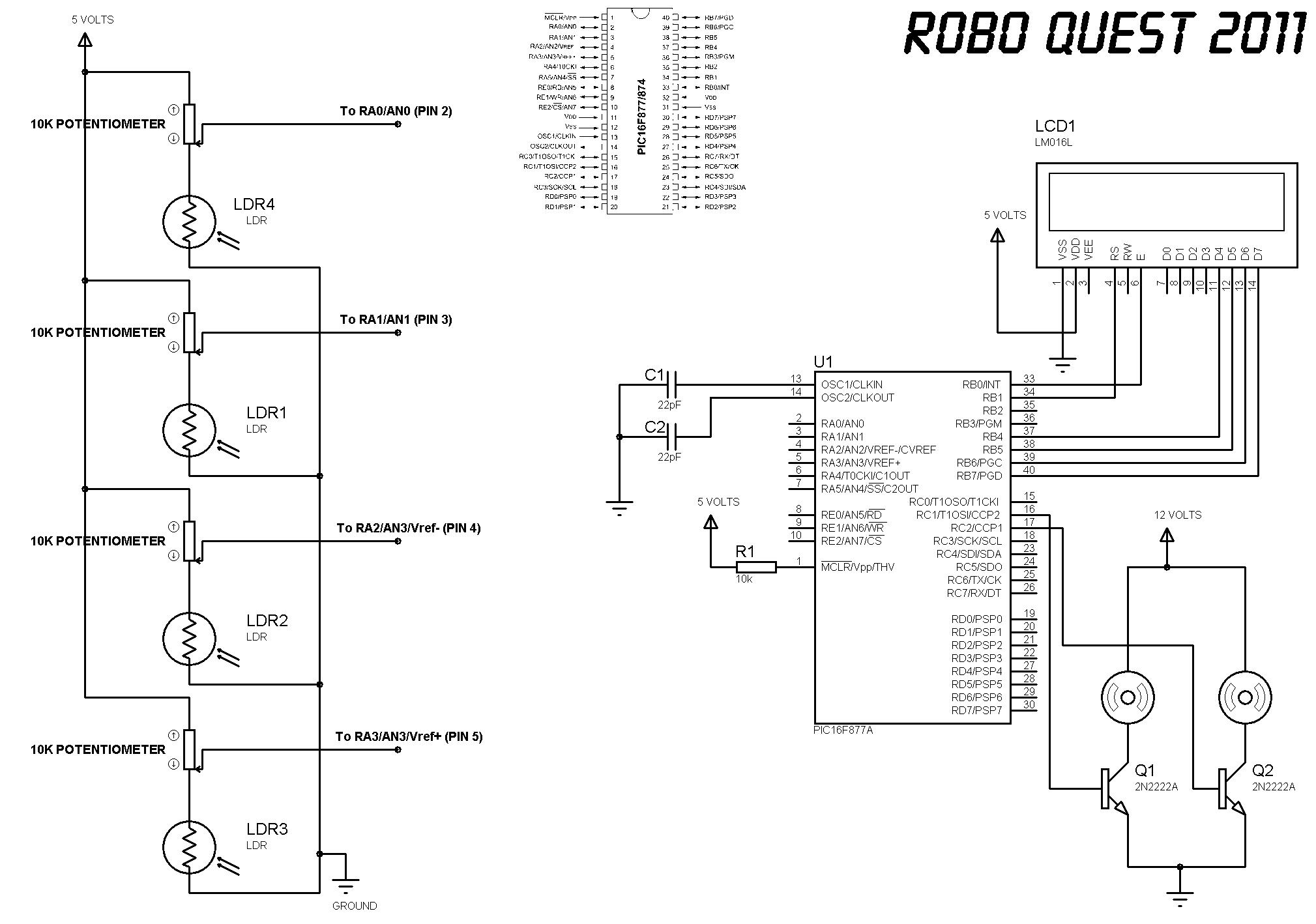
The concept diagram for a 1 cm line following robot illustrates the layout and functionality of the robot, emphasizing the role of sensors in detecting the line. A schematic for a robot equipped with five sensors is provided to demonstrate how multiple sensors can enhance the robot's tracking accuracy and responsiveness to line deviations.
The recommended software tools, such as the PIC C Compiler, allow for the development of firmware that controls the robot's behavior, while Proteus provides a simulation environment for testing the circuit designs before physical implementation. PIC PGM is essential for programming the PIC microcontroller, enabling the user to upload the compiled code directly to the hardware.
For the construction of a simpler robot using three sensors, the specified components include the PIC16F877A microcontroller, which serves as the brain of the robot, processing sensor input and controlling motor outputs. The inclusion of a 20 MHz crystal oscillator ensures stable clock frequency operation, critical for maintaining timing accuracy in the microcontroller's operations.
This comprehensive approach to the design and implementation of line following robots provides a solid foundation for further exploration and development in robotics and automation technologies.LECTURES on LINE FOLLOWING ROBOT Lecture 1 (a) Lecture 1 (b) Lecture 1 (c) Concept Diagram (1cm LINE FOLLOWING) Schemetic for 5 sensors ROBOT SOftwares you guyz would need for coding and programming: PIC C COMPILER PROTEUS PIC PGM Components for a 3 sensors ROBOT !! PIC16f877A Micro Controller - 1 20Mhz crystal. 🔗 External reference
Related Circuits
There are two differing opinions regarding the charging of alkaline batteries. Some assert that charging is effective, while others caution against it due to the risk of explosion. It is acknowledged that rechargeable alkaline batteries can typically endure 30...
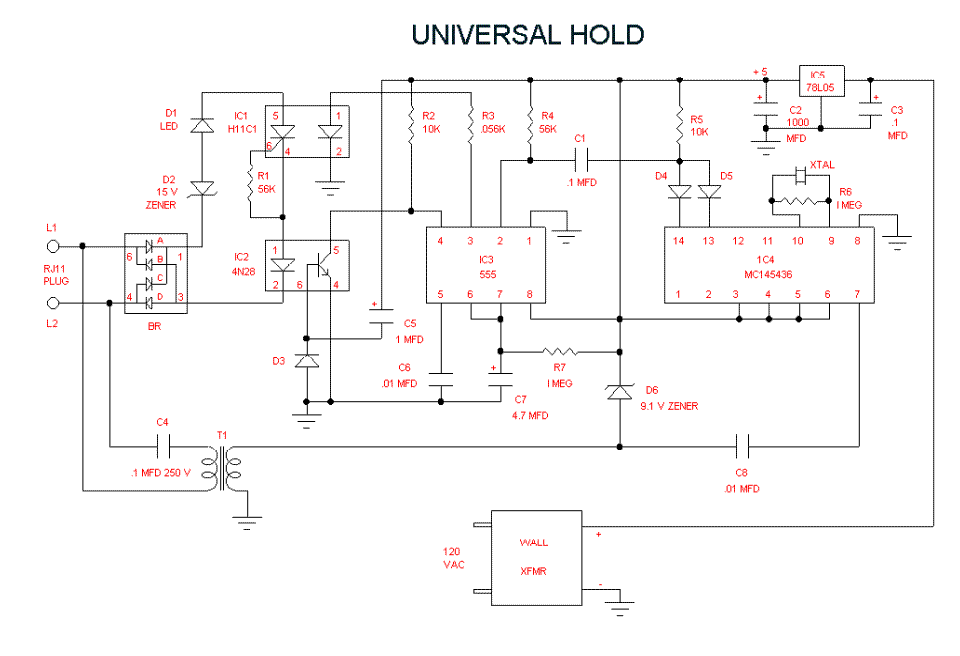
The UNIVERSAL HOLD circuit detects the dual tone, multi frequency (DTMF) tone that is generated when the # key is pressed and then activates a circuit that partially loads the telephone line so that the central office thinks a...
This compact circuit enables automatic recording of phone conversations. It connects to the phone line, the microphone input of a tape recorder, and the remote control jack of the recorder. The circuit detects the voltage on the phone line...
This project is used as an electronic private exchange. It has two telephones, which have the intercom facility, and they can be connected to the telephone line. All the functions are controlled by the 8-bit microcontroller AT89C2051 which has...

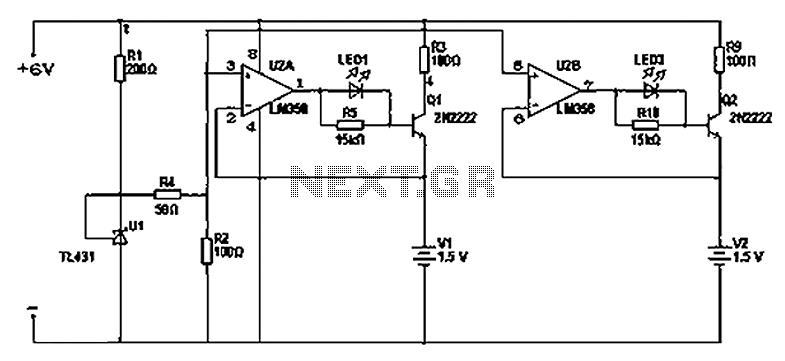
This simple robot responds to light and avoids obstacles without the need for a microcontroller, programmer, or PC. The only specialized component in the circuit is a window discriminator, which functions as a window comparator. Resistors R1 and R2,...
It is widely recognized that power-saving regulations necessitate very low power consumption during standby conditions for all equipment continuously connected to mains power. In the standard version of the power supply, standby power consumption is approximately 9.0 W for...