
Parking sensor circuit

The circuit operates by utilizing an NE555 timer configured in astable mode, generating a continuous square wave output at a frequency of 120 Hz. This output drives an infrared LED (D1), which emits modulated infrared light. The modulation allows the system to differentiate between ambient light and reflected signals from obstacles. The infrared light reflects off nearby objects and is captured by an infrared photodiode (D2), which converts the received light into a corresponding electrical signal.
The signal from D2 is relatively weak and requires amplification. This is accomplished using the first operational amplifier (IC2a), which increases the signal strength for further processing. The amplified signal is then passed to a peak detector circuit, consisting of diode D4 and capacitor C4. The peak detector captures the maximum voltage level of the received signal, which corresponds to the proximity of the detected obstacle. Resistors R5 and R6 are crucial for ensuring that the forward voltage drop across D4 does not adversely affect the peak detection capability.
The output of the peak detector provides a voltage that varies with the distance to the obstacle. This voltage is subsequently fed into three comparators (IC2b, IC2c, and IC2d) within the LM324 operational amplifier. Each comparator is configured with a specific reference voltage set by resistors R7 to R10, allowing the circuit to determine which LEDs should be illuminated based on the distance measured. As the distance decreases, the output voltage from the peak detector increases, triggering the comparators to activate the corresponding LEDs (D5, D6, and D7). This visual feedback effectively communicates the proximity of obstacles to the driver, enhancing safety while reversing the vehicle.This simple circuit can be used as an aid for sensing the distance between the rear bumper of the car and any obstacle behind the car. The distance can be understood from the combination of the LEDs (D5 to D7) glowing. At 25cm D7 will glow, at 20 cm D7&D6 will glow and at 5cm D7, D6 and D5 will glow. When the obstacle is beyond 25 cm none of the a bove LEDs will glow. Two ICs are used in the circuit. The IC1 (NE555) is wired as an astable multivibrator for driving the IR Diode D1 to emit IR pulses. The operating frequency of the transmitter is set to be 120Hz. The IR pulses transmitted by D1 will be reflected by the obstacle and received by the D2 (IR photo diode). The received signal will be amplified by IC2a. The peak of the amplified signal will be detected by the diode D4 and capacitor C4. R5 and R6 compensates the forward voltage drop of D4. The output voltage of the peak detector will be proportional to the distance between car`s bumper and obstacle.
The output of peak detector is given to the inputs of the other three comparators IC2b, IC2c and IC2d inside the IC2 (LM324). The comparators switch the status LEDs according to the input voltage their inverting inputs and reference voltages at their non inverting inputs.
Resistances R7 to R10 are used to set the reference voltages for the comparators. 🔗 External reference
Related Circuits
The transmission circuit for inductive wireless headsets must be securely mounted on a wall or ceiling, limiting its outdoor usability, which is a significant disadvantage of inductive wireless headphones. In contrast, infrared wireless headsets utilize a compact infrared transmitter...
The sensor must be positioned at an angle of approximately 30 to 45 degrees relative to the ground. This orientation facilitates the drainage of rainwater, preventing accumulation that could trigger the alarm due to water retention on the sensor....
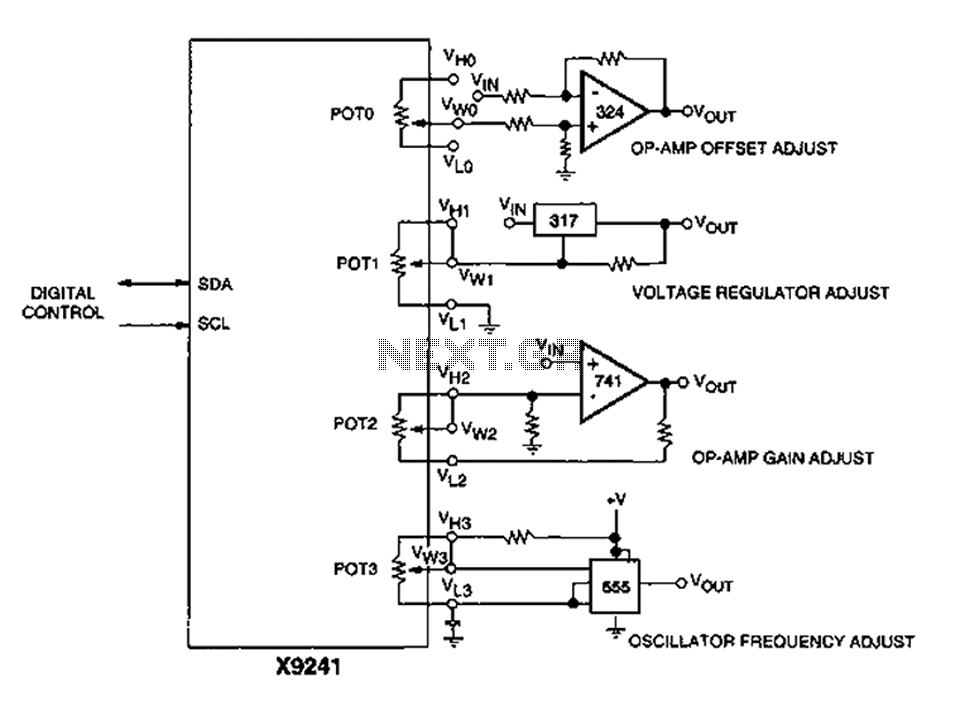
A XICOR X9241 POT IC module can be utilized to modify the four digital analog circuits, as depicted in the schematic. The XICOR X9241 is a digital potentiometer integrated circuit designed for precise adjustment of analog signal levels in various...
The circuit element appears to be problematic, particularly with the Shu component. After a prolonged period following the activation of the start button, there are indications of unexpected behavior, such as the turtles producing sperm-like substances. The Pi Wen...
The following circuit illustrates a curtain control circuit diagram. This circuit is based on the 555 integrated circuit (IC). Features include a switch for manual control, the IC, and additional components. The curtain control circuit utilizes the 555 timer IC...
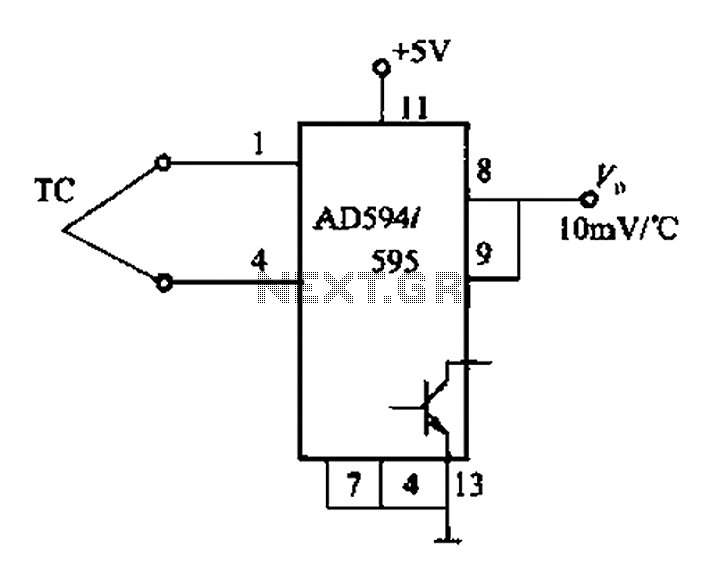
The AD594/595 series describes the relationship between output temperature and thermocouple voltage. For the AD594, the output voltage (Vo) is calculated using the formula: Vo = (VoJ + 16 μV) × 193.4 (mV), where VoJ represents the output voltage...