
pic sonar
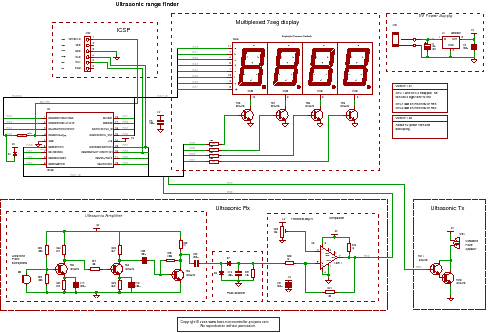
The PIC microcontroller serves as the central processing unit in the sonar range-finding system, leveraging its built-in capture timer to measure the time interval between the emission of an ultrasonic pulse and the reception of its echo. This time measurement is crucial as it directly correlates to the distance of the object being detected, following the principle that distance equals speed multiplied by time (d = vt). Given that sound travels at a known speed in air (approximately 343 meters per second at room temperature), the microcontroller can compute the distance by halving the measured time (to account for the round trip of the sound wave).
The circuit typically includes an ultrasonic transducer connected to the PIC microcontroller. The transducer emits a short burst of ultrasonic sound waves, which then reflect off nearby objects and return to the transducer. The microcontroller's timer captures the time taken for the sound wave to return.
In addition to the transducer, the circuit may include passive components such as resistors and capacitors to filter noise and stabilize the power supply. A display unit, such as an LCD or LED, can be integrated to visually present the calculated distance. The microcontroller can also be programmed to trigger alerts based on distance thresholds, enhancing the functionality of the sonar system.
Power management considerations are essential for battery-operated applications, and appropriate voltage regulators may be implemented to ensure stable operation of the microcontroller and associated components. The programming of the microcontroller can be done using languages such as C or assembly, allowing for flexibility in implementing various algorithms for distance measurement and processing.For the PIC sonar range finding project a PIC microcontroller is ideal. It has a capture timer that can accurately measure the ultrasonic echo time so the distance from the object can be calculated.. 🔗 External reference
Related Circuits
This device is utilized for recording signals from active sonar onto magnetic tape, allowing for subsequent playback to manage land-based sonar systems used in the training of operators. The modulator functions as a sawtooth generator, with its repetition frequency...
Microchip's PIC18F14K50 is an excellent choice, offering a wide range of features in a compact package at an affordable price. While focusing on the chip's numerous capabilities, a specific requirement for its flash programming was overlooked during the design...
Microchip has announced the availability of new PIC16F1512 and PIC16F151213 XLP microcontrollers. These new XLP (EXtreme Low Power) microcontrollers feature enhanced power management capabilities, making them suitable for battery-operated applications. The PIC16F1512 and PIC16F151213 microcontrollers are designed to operate with...
GTP USB PIC Programmer (Open Source). This project includes the GTP USB (not plus or lite). The schematic, photos, and PCB have been developed by PICMASTERS. The GTP USB PIC Programmer is an open-source device designed for programming PIC microcontrollers...
Over the weekend, an attempt was made to perform mechanical work by machining acrylic material to create a joint using a stepper motor. The effort was unsuccessful, particularly when trying to score and snap the acrylic, as cutting lengths...
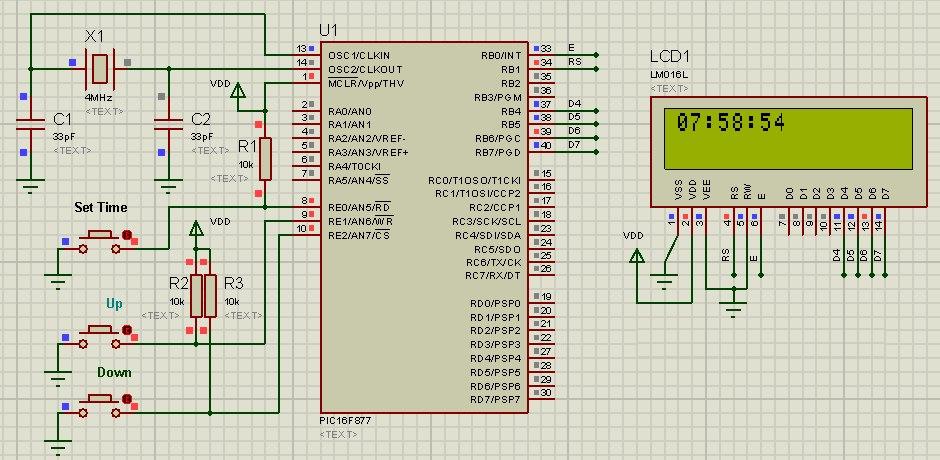
The PIC16 simulator (Proteus) allows for the verification of digital clock code, which can be modified as needed. Three push buttons are utilized to adjust the time. The code is written in C language using MPLAB with the HI-TECH...