
picaxe
The project involves the integration of several components to achieve a functional robotic arm. The decision to utilize a stepper motor for joint movement indicates an emphasis on precision and control in the arm's operation. Stepper motors are ideal for applications requiring accurate positioning, which is critical for tasks such as photography or complex manipulations.
The Picaxe-08 kits will serve as the microcontroller backbone for the project, allowing for programming and control of the stepper motors. These kits provide an accessible platform for prototyping, enabling the user to develop and test control algorithms effectively. The compact design of the Picaxe-08 is particularly suitable for integration into smaller robotic systems where space is at a premium.
The radio control system, consisting of a 6-channel transmitter and receiver, adds another layer of functionality to the robotic arm. This system allows for remote operation, which can be particularly useful for applications such as aerial photography, where the arm may need to be positioned at a distance. The compatibility with existing servos suggests that the project will incorporate various actuators for movement, enhancing the versatility of the robotic arm.
Overall, the combination of these components lays a solid foundation for the development of a sophisticated robotic arm capable of executing a range of tasks. Future projects may expand on this foundation, exploring more advanced control systems, additional sensors for feedback, and enhanced functionality through the incorporation of new technologies.I had a go at doing some mechanical work at the weekend. I tried to machine the acrylic I bought and create some kind of joint using a stepper motor. I have to say that I failed rather miserably! I tried scoring and snapping the stuff only to find that a cut length of anything longer than about 10cm was impossible! A hacksaw proved much better but I really don`t have the benches, vice, etc to make a decent job of it. I`m now thinking about getting something made up. The problem with that is that I`m finding it difficult to start designing when faced with a blank screen on a CAD package. It is holding the robot arm project up though. I purchased some bits off ebay. Firstly I bought some Picaxe compatible kits to help me prototype. Some of these are Picaxe-08 kits so I shall be making some compact stepper motor controls shortly. They were from rkeducation (they also have a web site ). Secondly, inspired by a kite aerial photography (and some RC ) videos I decided to buy some radio gear.
I now have a 6 channel transmitter and receiver which work well with the servos I have. I see a few more projects coming up 🔗 External reference
Related Circuits
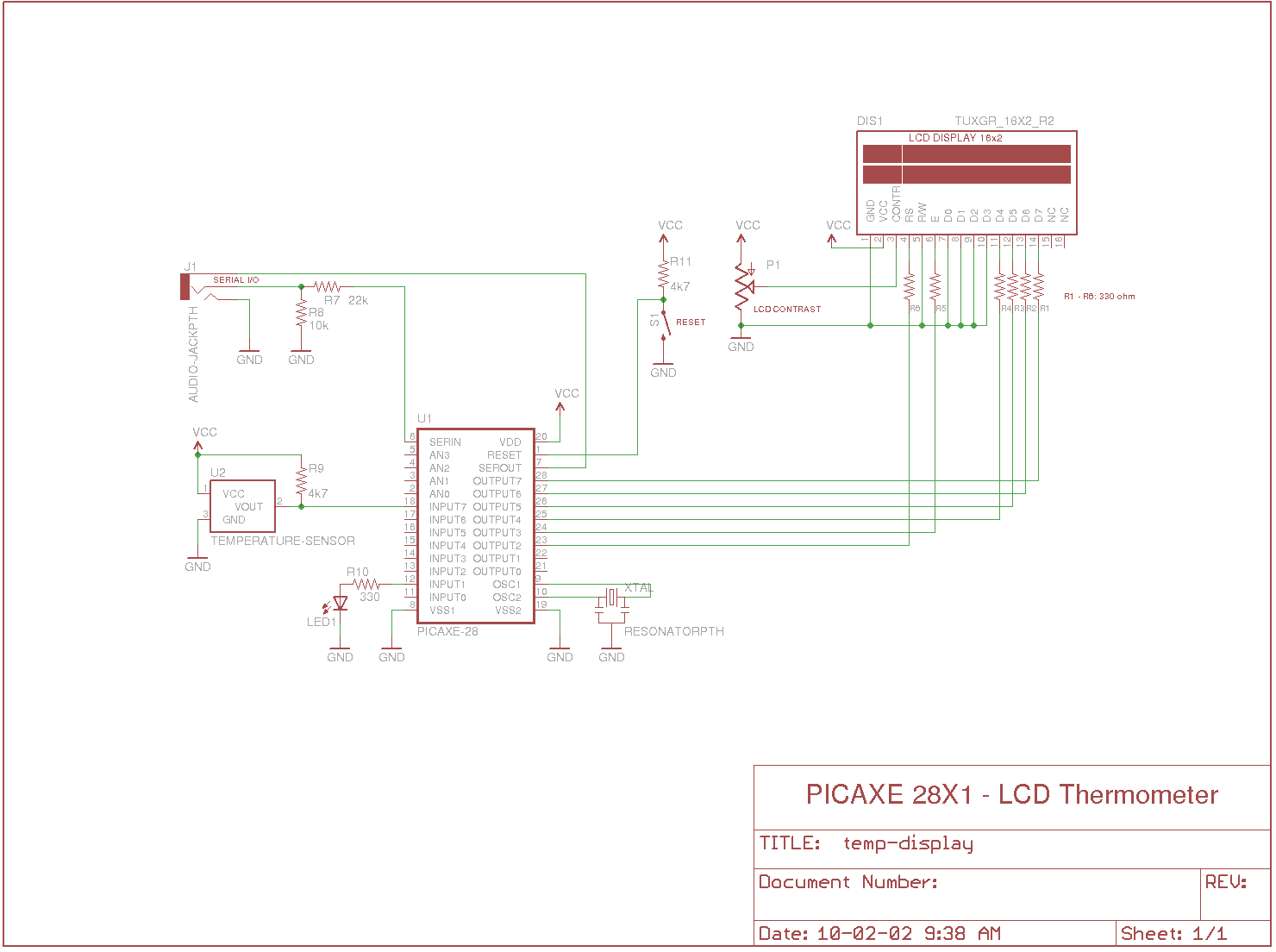
Measures the temperature using the DS18B20 temperature sensor, displays the reading on a 2x16 character LCD, sends the data to a serial terminal, and checks the temperature against predefined limits. The output is set high if the temperature is...
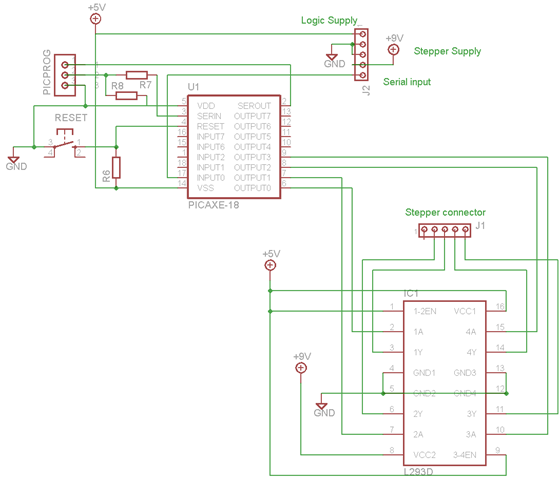
A schematic and program have been developed for operating a bipolar stepper motor through a serial interface, similar to the unipolar configuration. This is significant for the robot arm project, as two of the three stepper motors will be...
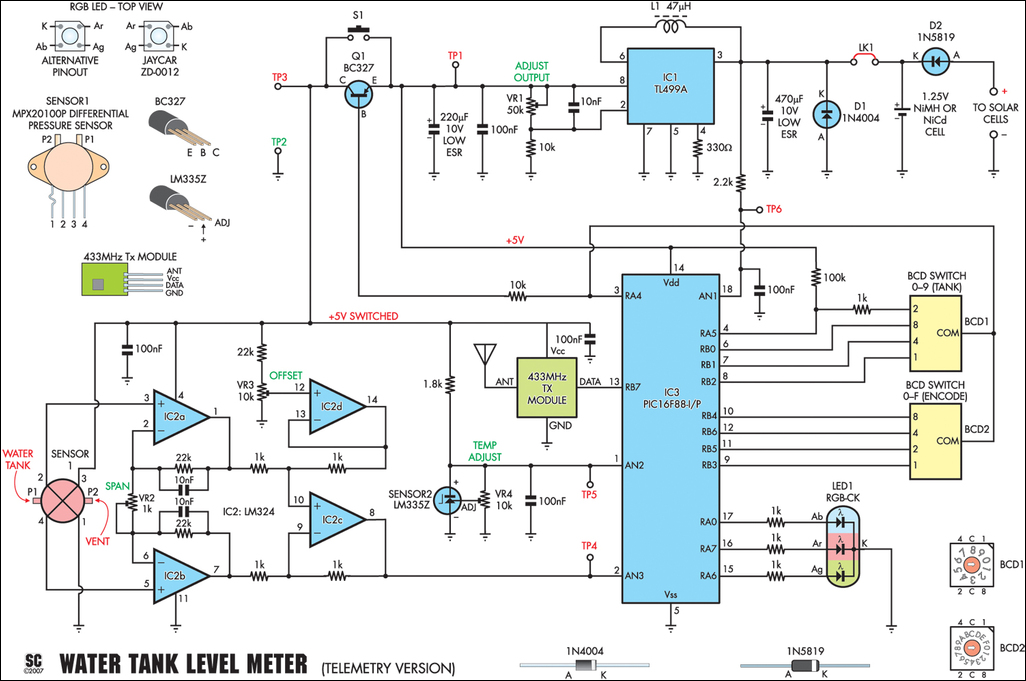
The design is based on Silicon Chip's PIC-Based Water Tank Level Meter. Instead of programming PICs, an Arduino was prototyped, and the final version was built using PICAXE microcontrollers. An MPX-2010DP silicon pressure sensor, which is temperature compensated and...
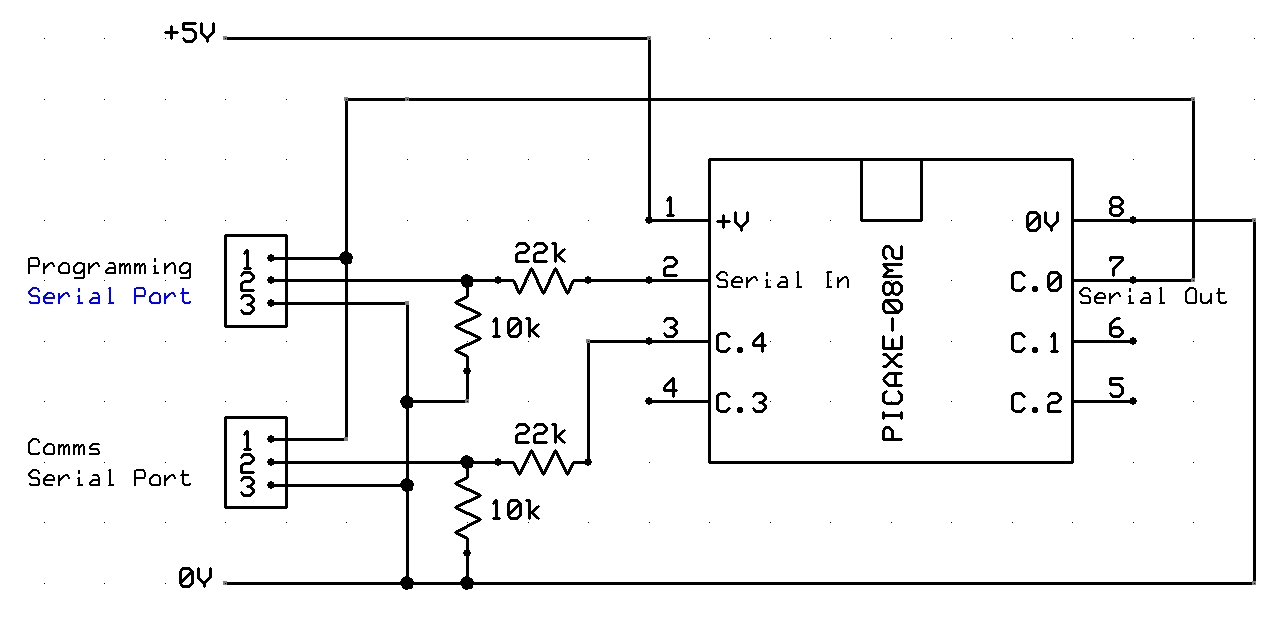
A tutorial on setting up RS232 communication with PICAXE, including a circuit diagram, serial cable configuration, PC communication program setup and configuration, along with sample code for PICAXE. The RS232 communication setup for PICAXE microcontrollers is essential for enabling serial...
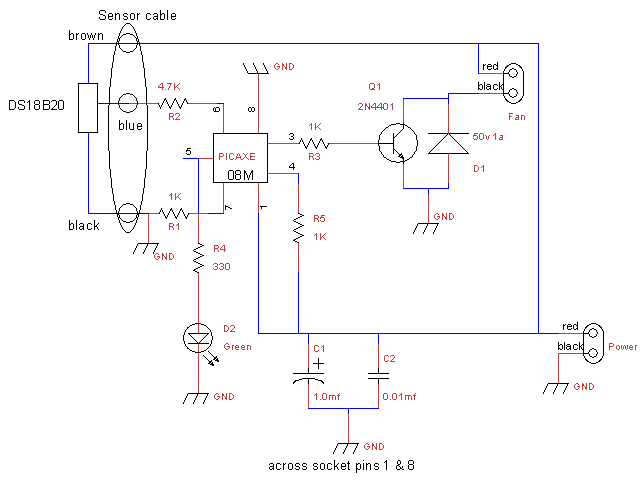
This is a fan controller designed for an audio/video cabinet. It utilizes a PICAXE 08M microcontroller and a DS18B20 temperature sensor. The fan activates at 30 degrees Celsius (approximately 86 degrees Fahrenheit) and deactivates at 28 degrees Celsius (around...

A circuit diagram and example code to implement and use the DS18B20 temperature sensor in PICAXE, both in rounded and full 12-bit resolution. The DS18B20 is a digital temperature sensor that communicates over a 1-Wire interface, allowing multiple sensors to...