
Programmable Stiffness Joint
The operation of the device is based on a linear coil extension spring, which has a constant stiffness within its elastic extension limit. As the positions of the spring's insertions on the base and rotating member change, the amount of spring extension for a given angular change of the rotating member varies, along with the torque produced by the spring tension. This principle allows for the generation of different stiffness values from a single linear extension coil spring. According to Hook's Law, a linear spring requires a constant incremental force to achieve a specific incremental change in length, where F represents the force applied, x is the change in length (extension), and k is the stiffness of the spring. Consequently, the amount of spring extension determines the tension force applied to the sliding insertion point on the rotating member, leading to increased rotational stiffness as the spring extends.
Additionally, torque (T) results from a force (F) applied at a distance (d) from the rotation axis. As the distance increases, the torque generated by a given tension force also increases, further enhancing rotational stiffness. The angle (β) between the tension force and the rotating member is also significant; only the component of the force that is tangential to the rotation contributes to torque. The remainder of the force acts as a compressive force in the rotating member and does not contribute to torque generation. As the angle between the spring and the vertical member decreases, rotational stiffness diminishes.
Throughout the device's range of motion (-20 degrees to +30 degrees), the spring stretch remains approximately linear, indicating limited changes in joint rotational stiffness due to non-linear spring stretch. Observations indicate that as the L2/L1 ratio increases, a plateau appears for L2/L1 > 2, suggesting minimal torque gain due to spring tension in this region. The peak torque produced by the spring occurs at a ratio of L2/L1 = 1. Beyond this ratio, the angle β becomes too small, resulting in insufficient tangential force from the spring tension to maintain torque, leading to a decrease in torque. Conversely, below this ratio, decreasing spring stretch results in reduced torque. The optimal operational range lies within these parameters.
The accompanying code is thoroughly commented and designed for stand-alone use or in conjunction with the Rotational Stiffness page. It computes and generates plots of the sliding insertion point's location on the rotating member relative to the stationary insertion point on the base. Additionally, it calculates and visualizes the amount of spring stretch experienced for various combinations of rotation and insertion distance ratios.The "Programmable Stiffness Joint" is a device which is able to internally modify the rotational stiffness of a simple pivot joint. It is intended to serve as a proof-of-concept for future work in developing a model for determining the respective damping and stiffness components of the human ankle joint over the able-bodied gait cycle.
This inform ation in turn will permit prosthetists and rehabilitation engineers to design and fit prostheses better designed for the user`s gait kinetics, which in turn should produce more natural gait kinematics. The goal of our project is: To develop a working model of a device which is able to control the stiffness of a joint in such a manner as to mimic the motion of a human ankle joint.
The user is able to select a stiffness level and the device will adjust itself to provide the specified level of rotational stiffness. The set-point of the joint will remain constant for all stiffnesses. This is how it works: A linear coil extension spring has a constant stiffness within its elastic extension limit.
As the location of the insertions of the spring on the base and rotating member change position, the amount of spring extension experienced for a given angular change of the rotating member will vary, as will the torque produced by the spring tension. These variations are taken advantage of to produce widely different stiffnesses from a single linear extension coil spring.
First, a linear spring requires a constant incremental force to achieve a given incremental change in the spring length. This is described by Hook`s Law (shown below) where F is the force applied to the spring, x is the change in length of the spring (in this case, it will only be extension), and k is the stiffness of the linear spring.
Due to this relationship, the amount of extension of the spring will determine the tension force applied to the sliding insertion point on the rotating member. Therefore as the amount of spring extension increases, the amount of rotational stiffness increases. Secondly, a torque (T) is the result of a force (F) applied at a distance (d) from the axis of rotation.
As the distance from the axis increases, the torque produced by a given tension force increases, therefore the rotational stiffness increases. Lastly, the angle (beta) between the tension force and the rotating member matters. Only the component of the force which is tangential to the rotation is generating torque. The rest of the force becomes a compressive force in the rotating member, and does not contribute. As the angle between the spring and the vertical member decreases, the rotational stiffness decreases.
Over the range of motion of this device (-20 degrees to +30 degrees) the spring stretch is pretty close to linear. This suggests that there will be limited change of joint rotational stiffness due to non-linear spring stretch.
As the L2/L1 ratio increases, there seems to be a plateau for L2/L1 > 2. This suggests that the torque gain due to spring tension in this region would be minimal. The peak torque produced by the spring seems to be at a ratio of L2/L1 = 1. Above this point, the angle beta is too small, and not enough of the spring tension force is tangential to the rotation, so the torque actually decreases. Below this ratio, the amount of spring stretch is decreasing, resulting in reduced torque. The ideal region to be working within is the region: The code is heavily commented and is intended to be used either stand-alone or in conjunction with the Rotational Stiffness page.
The plots produced are internally formatted and ready for viewing upon running the code. The code computes and plots the location of the sliding insertion point on the rotating member relative to the stationary insertion point on the base. It also computes and plots the amount of spring stretch experienced for a given combination of rotation and insertion distance ratios, assuming that th
🔗 External reference
Related Circuits
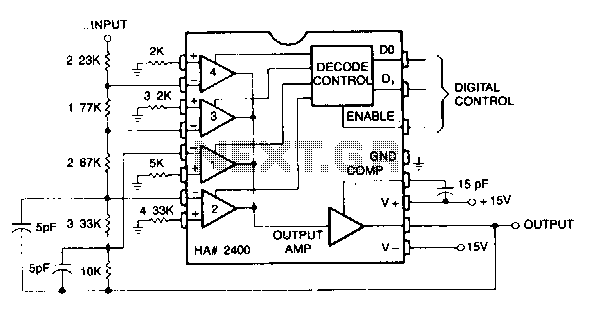
This circuit can be programmed for a gain of 0, -1, -2, -4, or -8. This could also be accomplished with one input resistor and one feedback resistor per channel in the conventional manner, but this would require eight...
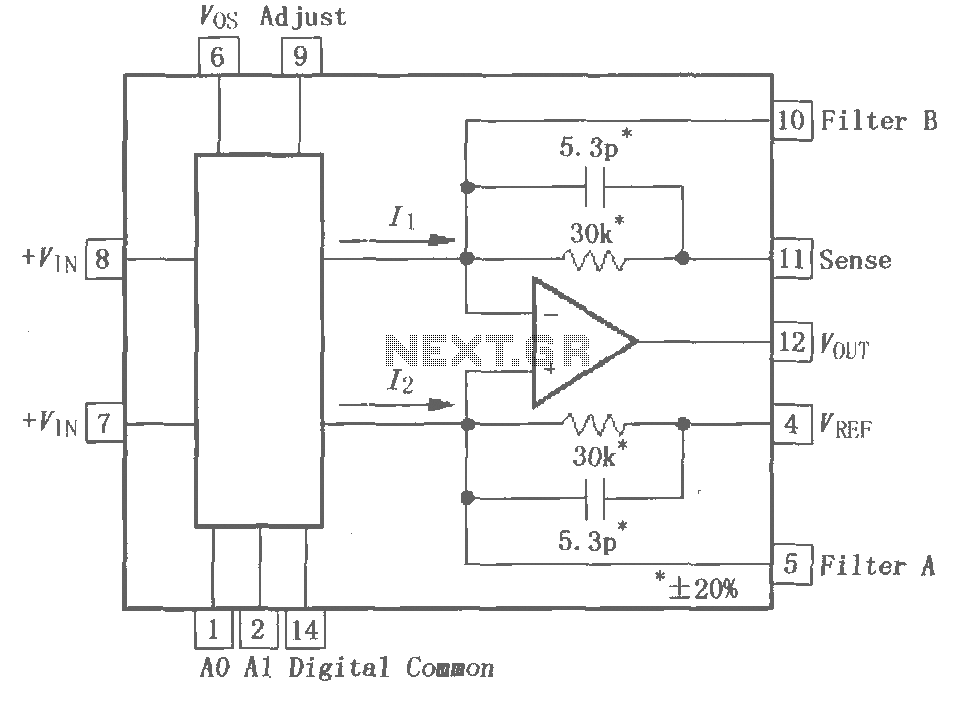
The PGA202 is a digitally controlled programmable gain amplifier with gain settings of G = 1, 10, 100, and 1000. The PGA203 offers gain settings of G = 1, 2, 4, and 8. Both amplifiers are compatible with CMOS...
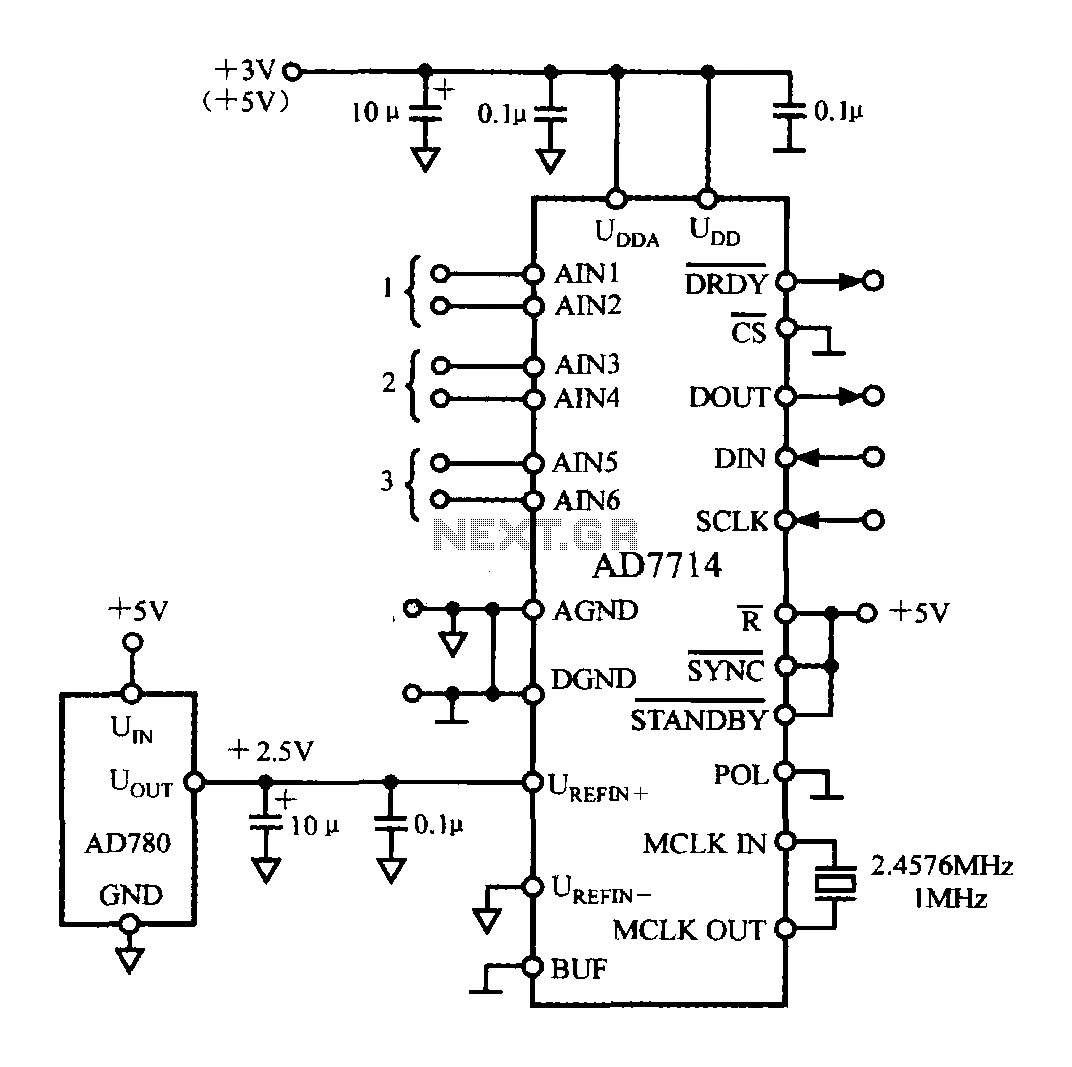
The typical application circuit for the AD7714 is illustrated in the accompanying figure. The UDD and UDDA terminals of the AD7714 can be connected to either a +3V or +5V power supply. The analog inputs are arranged as three...
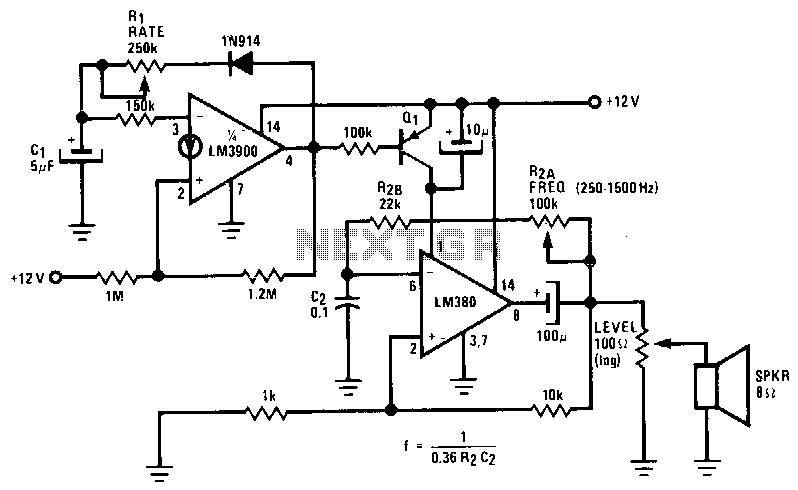
The LM380 functions as an astable oscillator, with the frequency set by R2 and C2. By adding Q1 and driving its base, the output of an LM3900 is configured as a second astable oscillator. This setup gates the output...
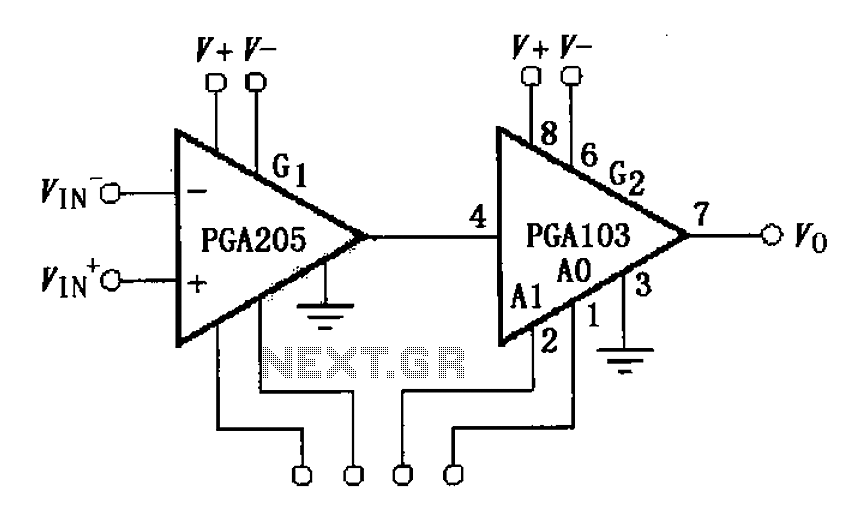
The circuit depicted in the figure comprises a PGA103 programmable gain instrumentation amplifier. This design utilizes the PGA205 and PGA103 in a cascading configuration, resulting in a total gain for the amplifier. The gain is determined by the product...
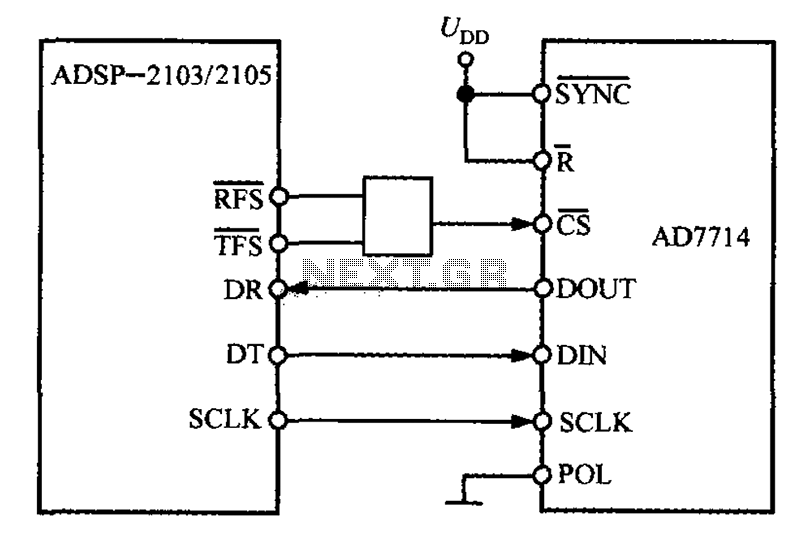
The ADSP-2103 and ADSP-2105 are digital signal processors that interface with the AD7714. When the output is active, the ADSP-2103/2105 configuration includes the RFS non-TES non-terminal set to a low level, while the SCLK terminal is configured for serial...