
servo motor tester circuit
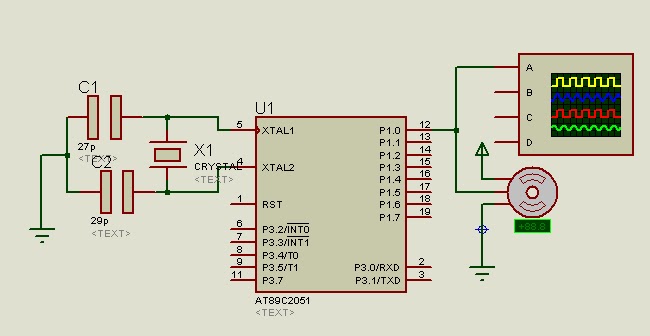
The circuit for controlling a servo motor typically consists of a microcontroller, a power supply, and the servo motor itself. The microcontroller generates a PWM (Pulse Width Modulation) signal that determines the position of the servo motor. The PWM signal is sent to the control wire of the servo, which interprets the signal and adjusts its position accordingly.
In this setup, a common microcontroller such as an Arduino can be utilized. The Arduino outputs a PWM signal on one of its digital pins, which is connected to the signal wire of the servo. The ground pins of both the Arduino and the servo must be connected to a common ground to ensure proper operation.
The power supply should match the voltage requirement of the servo motor, which is typically between 4.8V and 6V for standard servos. It is essential to ensure that the power supply can provide sufficient current, as servos can draw significant current, especially under load.
The program can be written in the Arduino IDE, where the servo library simplifies controlling the motor. The library provides functions to set the angle of the servo motor, allowing for easy manipulation of its position. By adjusting the duration of the high signal in the PWM, the angle of rotation can be controlled, enabling the servo to move in both clockwise and counterclockwise directions.
Overall, this circuit design provides a straightforward approach to controlling a servo motor, making it suitable for various applications, including robotics, automation, and hobby projects. The flexibility to modify the program allows users to tailor the functionality to their specific needs.Here is the program to control simple servo motor in both direction. I test it today and think that i should also share it with you people so that you can also enjoy and can takebenefit. This program will rotate servo motor in both clock wise and anti clock wise direction you can modify it according to your requirement and according to your wish a
s suite to you. 🔗 External reference
Related Circuits
The LM317T is an adjustable three-terminal positive voltage regulator that can supply over 1.5 amps with an output voltage range of 1.25 to 37 volts. It features built-in current limiting and thermal shutdown, making it highly reliable and resistant...
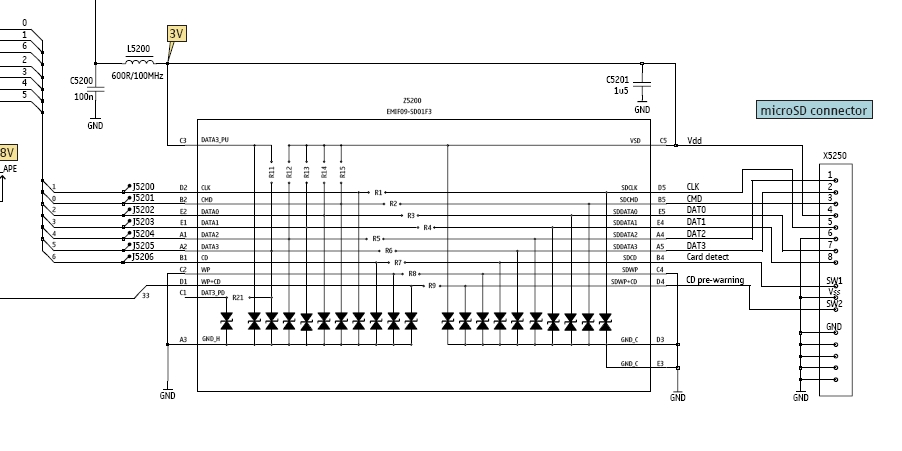
In this tutorial, the functioning of the memory card circuit in mobile phones will be explored. The previous post discussed the pin-outs and types of memory cards utilized in cellular devices. The accompanying block diagram illustrates how the removable...

The circuit automatically lights a bulb upon the arrival of a telephone ring and simultaneously mutes the audio from the music system or TV while the telephone handset is off-hook. The lighting of the bulb not only indicates an...
The circuit utilizes a quad voltage comparator (LM339) as a basic bar graph meter to display the charge status of a 12-volt lead-acid battery. A 5-volt reference voltage is applied to each of the positive (+) inputs of the...
This module utilizes an unconventional topology while retaining the fundamental operational amplifier circuitry of the main module, with some modifications in resistor values. A distinctive feature of this circuit is the incorporation of six-way switches instead of the more...
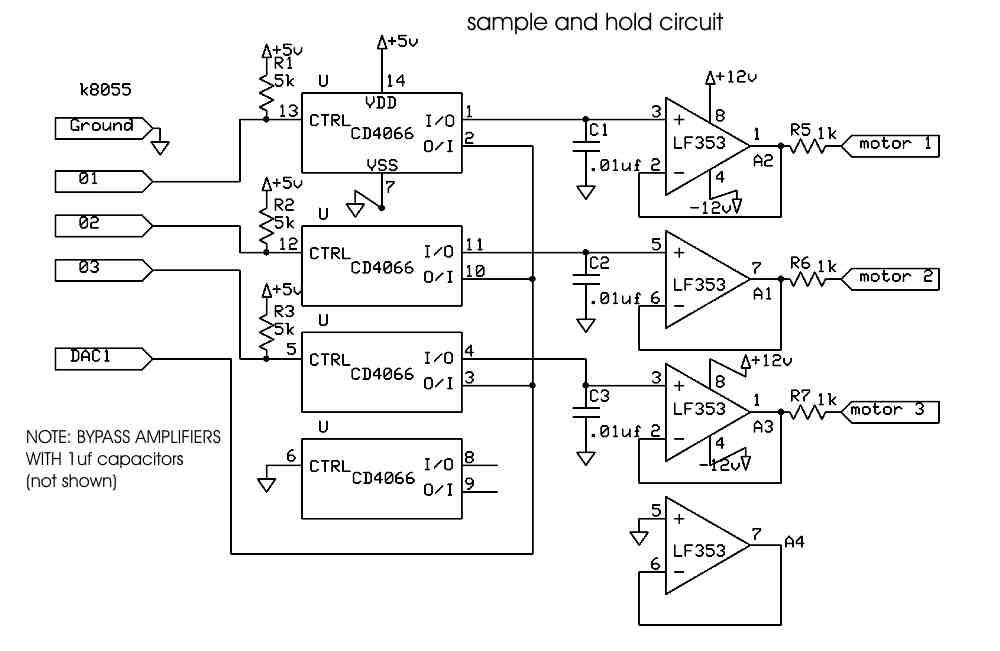
The current Milwaukee Guitar design utilizes an off-board computer (a desktop PC) to control the servomotors. A standard USB number pad is connected to the computer, which provides output signals through a Velleman K8055 USB experiment interface board to...
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713