
Small 3-wheel ROBOT with PIC16F84 brain & InfraRed eyes
The circuit involves an infrared LED that emits light at a frequency of 36 kHz. This light travels until it encounters an object, where it is reflected back towards a photodetector or infrared receiver module. The photodetector is designed to be sensitive to the 36 kHz frequency, ensuring that it only activates in response to the reflected infrared light.
Upon receiving the reflected signal, the receiver module sends a signal to the PIC16F84 microcontroller. This microcontroller is programmed to interpret the input from the receiver module. In response to the signal, the microcontroller executes a control algorithm that determines the appropriate action for the robot. Specifically, it will reverse one of the motors to steer the robot away from the detected obstacle.
The circuit may also include additional components such as resistors for current limiting, capacitors for signal smoothing, and possibly a transistor or relay to control the motor's operation. The motor driver circuit is crucial as it interfaces between the microcontroller and the motors, allowing the low-power signals from the PIC16F84 to control the higher power requirements of the motors.
Overall, this design exemplifies a basic obstacle avoidance mechanism in robotic applications, utilizing infrared sensing technology and microcontroller logic to achieve autonomous navigation.When the 36 kHz infrared light from the LEDs is reflected by an object, one of the receiver modules will be triggered, and the PIC16F84 µController will steer the ROBOT away from the objects by reversing one of the motors. 🔗 External reference
Related Circuits
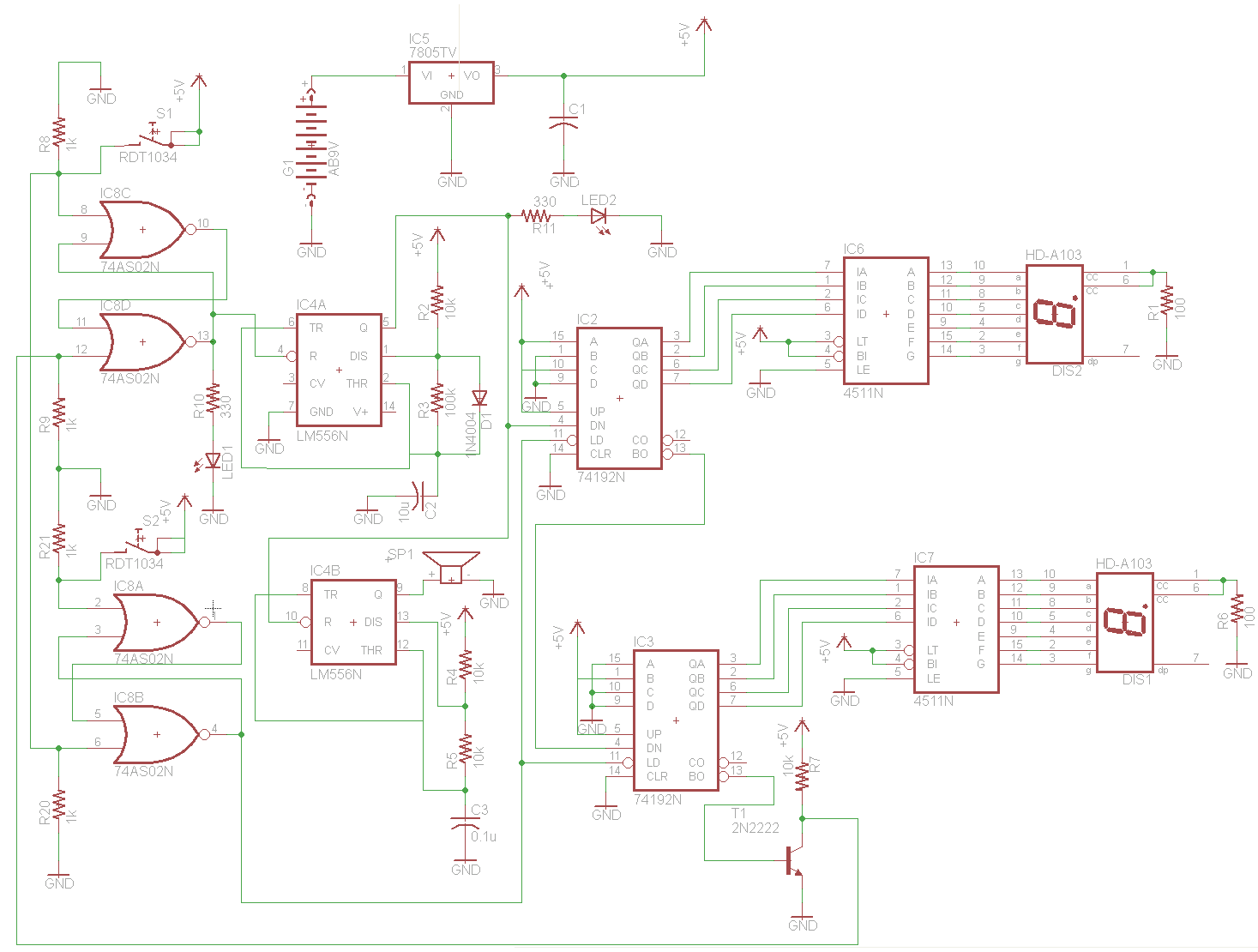
The schematic for controlling the motors is divided into three main sections, each serving a distinct function. The primary components featured in the schematic include the PIC 18F252 microcontroller, the SN754410 motor driver, and 2N2222 transistors. At the top...
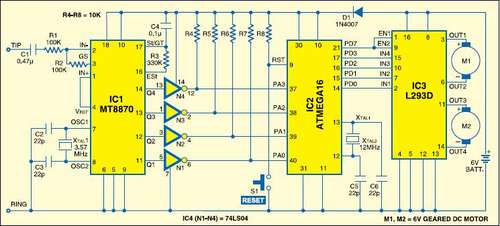
This add-on circuit enables remote switching on/off of battery-operated toy cars using a TV/video remote control handset operating at 3040 kHz. The described circuit utilizes a remote control system to facilitate the wireless operation of battery-powered toy cars. The primary...
This instructable is categorized under 13 - 18 in the National Robotics Week Robot Contest. The National Robotics Week Robot Contest encourages innovation and creativity in robotics among participants aged 13 to 18. This category represents a significant opportunity for...
This is the latest version of the Improved Infrared Receiver with Status LED which can control any desktop PC with an ordinary remote control. The project comes along with a small PCB in order to save space. It connects...
BEAM enthusiasts often quickly learn to scavenge necessary components for their projects from technoscrap. However, there will always be occasions when purchasing new parts or materials becomes essential. This trend is increasingly prevalent as Application Specific Chips are being...
This page presents information on infrared - Across The Track train detection circuits. The circuits are designed around the LM339 comparator chip and can use a wide assortment of matched infrared - emitter / detector pairs. The basic circuit...