
Ultrasonic / Bat detector
This circuit is designed for enhanced sensitivity in detecting bat echolocation calls, particularly effective at frequencies around 20kHz, while still accommodating the detection of calls at 40kHz. The core of the circuit utilizes a 40kHz transducer, which is amplified by a gain factor of 4000, facilitating the detection of both common and less-common bat species. The inclusion of a 4-pole Chebyshev high-pass filter is essential, as it significantly attenuates ambient noise, ensuring that only relevant signals trigger the CMOS counter. The filter's steep roll-off below 15kHz ensures minimal response to frequencies at or below 10kHz, thus optimizing the circuit's performance in noisy environments.
The circuit's physical design can influence its susceptibility to interference; therefore, a metal enclosure is recommended over a plastic one. This design choice helps shield sensitive components from electromagnetic interference. The use of point-to-point wiring on a ground plane is indicated, although perforated strip-board is suggested for ease of assembly and troubleshooting. The circuit operates at a current consumption of approximately 15mA without audio output, making it suitable for battery operation, with a PP3 battery providing sufficient power for several evenings of use.
Careful attention to component selection is critical, particularly in the high-pass filter section, where low-noise, close-tolerance resistors and capacitors should be utilized to achieve optimal performance. It is advised to avoid carbon resistors throughout the circuit to minimize noise. The LM386 amplifier, which has a maximum voltage rating of 15V (with 12V recommended for optimal performance), should be used within its limits to prevent damage.
To mitigate feedback issues, it is recommended to either remotely mount the microphone and speaker or utilize a unidirectional microphone module. This configuration helps in localizing bat sounds while reducing the likelihood of feedback when the speaker is in close proximity to the microphone. Overall, this circuit offers a robust solution for bat detection, combining sensitivity, noise rejection, and practical design considerations for effective field use.I have found this circuit to have better sensitivity, both in distance to a visible bat and in audio frequency, than some other published circuits using a 40kHz transducer with 4000x gain amplification, though the 40kHz transducer I used for the comparison may have a bearing on these results. The high-pass filter is included purely to help eliminate the circuit being triggered by ambient noise.
The filter is a 4-pole Chebychev with a very steep roll-off below 15kHz. There is virtually zero response at 10kHz and below. This type of circuit relies on the wanted signal being loud enough to trigger the CMOS counter, so the less unwanted signal that reaches the circuit the better. Whilst any of the basic circuits based around a 40kHz transducer will perform adequately for the detection of bats calling within that frequency range, which includes many of the more common species, this circuit will give much better indication of the presence of less-common bats that call at lower frequencies, around 20kHz, as well, hopefully, those at somewhat higher frequencies. When used at dusk, when individual bats are still visible, pointing a unidirectional microphone at a solitary bat indicates a usable range of at least 100ft (30m).
Bats actually call very loudly indeed ... it's probably a good job we cannot hear them, else they would keep us awake! My circuit was built in a metal box, because that was what I had to hand, using point-to-point wiring on a ground-plane. Perforated strip-board should be perfectly adequate and probably a lot easier to fault-find should you make a mistake.
I do not have nor intend to produce a pcb layout, so please do not ask for one, though if you should feel the need to produce one and have the inclination to share it I would be only too willing to include it (or a link to it) on this page. The circuit may be more susceptable to interference from electronic sources if built in a plastic container.
Current consumption is around 15mA with no audio output, so a PP3 battery should last for several evenings unless you have got a lot of bats in your area. For regular or extended use, rechargeable batteries or an external power source would make sense. Note that the LM386 has an absolute maximum voltage of 15v (12v recommended), but the rest of the circuit is OK to 15v.
Also be aware, if tempted to use a regulated supply incorporating a 78xx series regulator, that these do generate a lot of noise, so extra filtering could be necessary, especially on the microphone supply. Component choice for the high-pass filter section is critical for good results, close-tolerance low-noise resistors and capacitors should be used to achieve the expected performance.
Similar low-noise components should also be used in the rest of the circuit, (no carbon resistors!), though the tolerances are less critical elsewhere. Having the microphone and loudspeaker both mounted on/in the detector itself can result in unwanted feedback limiting the volume the speaker can be used at.
With the microphone mounted on the detector, simply handling the unit can cause audio output, though this can be reduced to a minimum if the unit is held firmly and moved gently. Remote mounting of the speaker and/or microphone, the use of a uni-directional microphone module (also helpful to determine where the bat is or for listening to an individual bat), or at least having the speaker facing away from the microphone, all help reduce/eliminate feedback, making it easier to share the experience with others.
🔗 External reference
Related Circuits
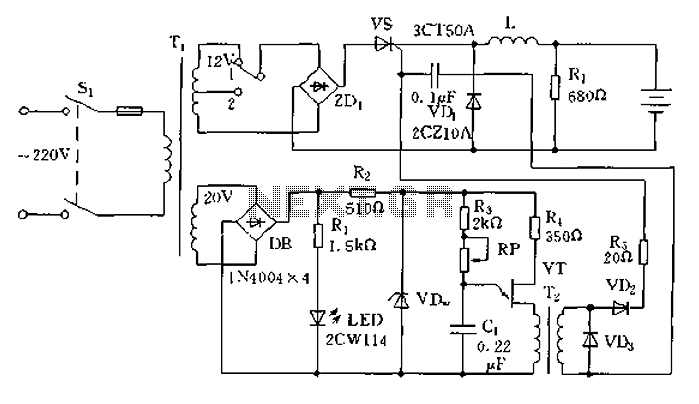
The circuit operates on the principle of a transformer, bridge rectifier, and conditioning for battery charging. The charging current can be adjusted to approximately 12V at 100A. For battery charging, a charging rate of 10 hours requires a charging...
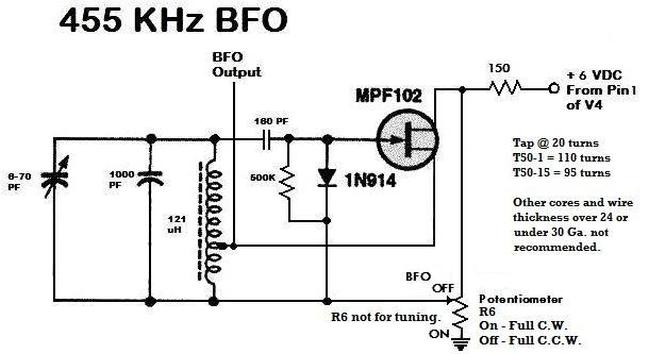
The circuit consists of two balanced components forming a simple Beat Frequency Oscillator (BFO) metal detector. The BFO utilizes a ready-assembled and tested circuit board with a PIC 12F675 chip at its center. This passive detector employs a detector...
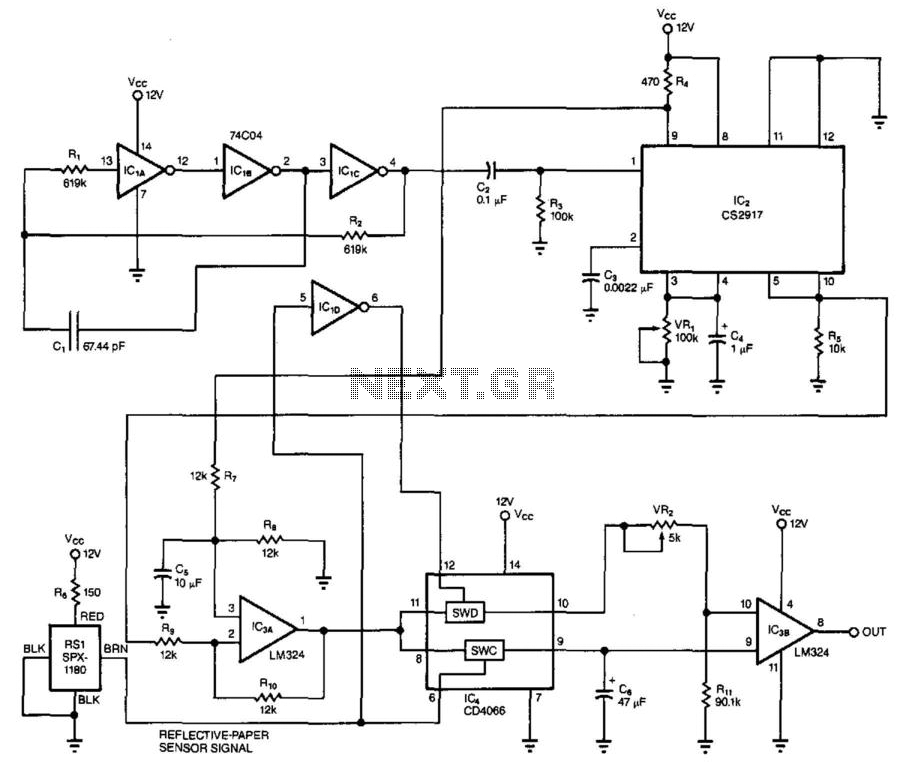
This circuit utilizes the principle of capacitance between two plates to detect when multiple sheets of paper are placed between the sensing electrodes simultaneously. CI is the sensing capacitor, composed of two plates measuring 2 inches by 15 inches...
The core component of this DIY metal detector circuit is the CS209A. The metal detector is constructed using a single 100 µH coil. The CS209A features an oscillator that creates an LC circuit; the inductance of the coil alters...
It is well known that many animals are particularly sensitive to high-frequency sounds that humans cannot hear. Many commercial pest repellers based on this principle are available, most of them operating in the range of 30 to 50 kHz....
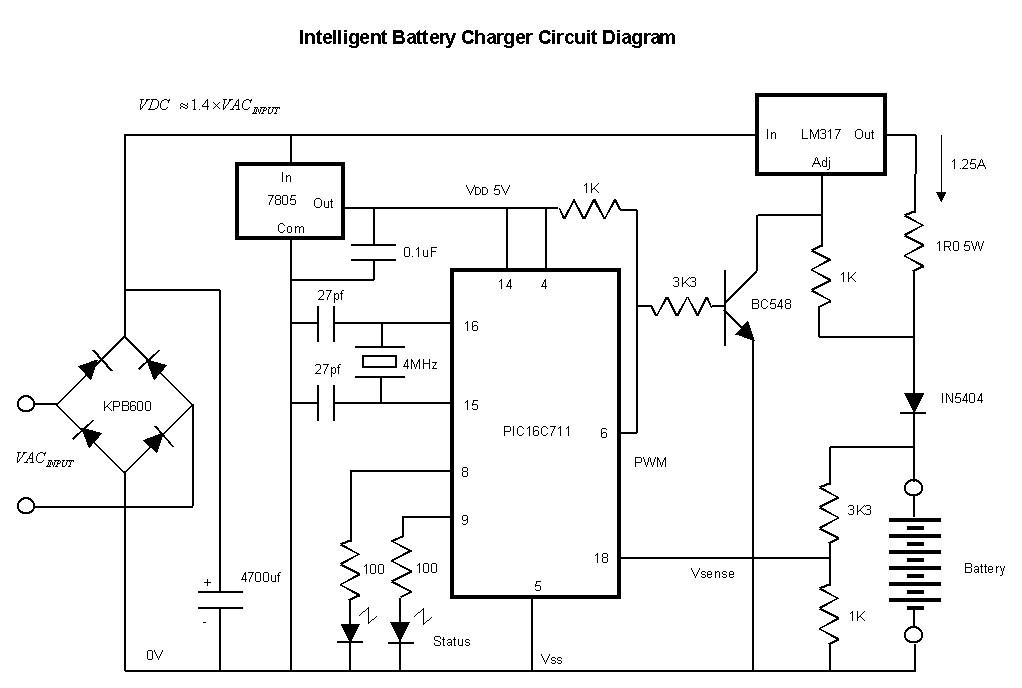
This affordable and simple-to-construct NiCd/NiMH battery charger is designed for the automatic charging of various batteries used in numerous applications. Reliable chargers are typically costly, while inexpensive chargers that come with original equipment often fail to charge cells correctly,...