
Ultrasonic range finder using 8051
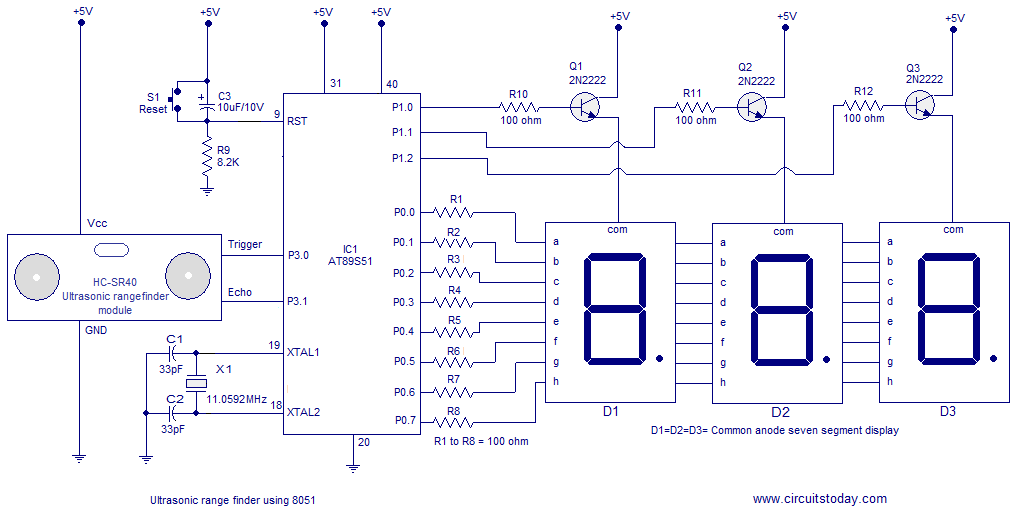
Trigger: The trigger signal for starting the transmission is given to this pin. The trigger signal must be a pulse with a 10 µs high time. When the module receives a valid trigger signal, it issues 8 pulses of 40 kHz ultrasonic sound from the transmitter. The echo of this sound is picked up by the receiver. The next triggering pulse can be given only after the echo has faded away, and this time period is called the cycle period. The cycle period for the HC-SR04 must not be below 50 ms. According to the datasheet, the distance can be calculated from the echo pulse width using specific equations. The ultrasonic module is interfaced to the microcontroller through P3.0 and P3.1 pins. Port 0 is used for transmitting the 8-bit display data to the display, while port pins P1.0, P1.1, and P1.2 are used for transmitting display drive signals for the corresponding display units D1, D2, and D3. A push-button switch S1, capacitor C3, and resistor R9 form a de-bouncing reset circuitry. Capacitors C1, C2, and crystal X1 are associated with the clock circuit.
The schematic design of the ultrasonic range finder can be divided into several functional blocks. The first block consists of the microcontroller (AT89S51), which serves as the central processing unit. It interfaces with the HC-SR04 ultrasonic module, which includes a transmitter and receiver for ultrasonic signals. The microcontroller's P3.0 pin is connected to the Trigger pin of the HC-SR04, while the Echo pin is connected to P3.1 for receiving the echo signal.
The display section consists of a 3-digit seven-segment display driven by Port 0 of the microcontroller. Each segment of the display is activated by sending the appropriate binary data from the microcontroller, allowing for the visual representation of the distance measured by the ultrasonic sensor.
The timing and control logic is managed by the microcontroller's Timer 1, which is configured in mode 2 for auto-reload functionality. This allows for precise timing of the echo signal measurement, ensuring accurate distance calculations. The de-bouncing circuitry, consisting of S1, C3, and R9, ensures that any noise from the push-button does not interfere with the reset operation of the microcontroller.
Overall, this ultrasonic range finder circuit effectively combines the capabilities of the 8051 microcontroller and the HC-SR04 ultrasonic module to provide reliable distance measurements for various applications in embedded systems.A simple ultrasonic range finder using 8051 microcontroller is presented in this article. This ultrasonic rangefinder can measure distances up to 2. 5 meters at an accuracy of 1 centi meter. AT89s51 microcontroller and the ultrasonic transducer module HC-SR04 forms the basis of this circuit. The ultrasonic module sends a signal to the object, then picks up its echo and outputs a wave form whose time period is proportional to the distance. The microcontroller accepts this signal, performs necessary processing and displays the corresponding distance on the 3 digit seven segment display. This circuit finds a lot of application in projects like automotive parking sensors, obstacle warning systems, terrain monitoring robots, industrial distance measurements etc.
HC-SR04 is an ultrasonic ranging module designed for embedded system projects like this. It has a resolution of 0. 3cm and the ranging distance is from 2cm to 500cm. It operates from a 5V DC supply and the standby current is less than 2mA. The module transmits an ultrasonic signal, picks up its echo, measures the time elapsed between the two events and outputs a waveform whose high time is modulated by the measured time which is proportional to the distance. . The photograph of an HC-SR04 module is shown below. The supporting circuits fabricated on the module makes it almost stand alone and what the programmer need to do is to send a trigger signal to it for initiating transmission and receive the echo signal from it for distance calculation.
The HR-SR04 has four pins namely Vcc, Trigger, Echo, GND and they are explained in detail below. 2)Trigger: The trigger signal for starting the transmission is given to this pin. The trigger signal must be a pulse with 10uS high time. When the module receives a valid trigger signal it issues 8 pulses of 40KHz ultrasonic sound from the transmitter. The echo of this sound is picked by the receiver. From the timing diagram, you can see that the 40KHz pulse train is transmitted just after the 10uS triggering pulse and the echo output is obtained after some more time.
The next triggering pulse can be given only after the echo is faded away and this time period is called cycle period. The cycle period for HC-SR04 must not be below 50mS. According to datasheet, the distance can be calculated from the echo pulse width using the following equations.
The ultrasonic module is interfaced to the microcontroller through P3. 0 and P3. 1 pins. Port0 used for transmitting the 8 bit display data to the display and port pins P1. 0, P1. 1, P1. 2 are used for transmitting display drive signals for the corresponding display units D1, D2, D3. Push button switch S1, capacitor C3 and resistor R9 forms a de-bouncing reset circuitry. Capacitors C1, C2 and crystal X1 are associated with the clock circuit. ORG 00H // origin MOV DPTR, #LUT // moves the address of LUT to DPTR MOV P1, #00000000B // sets P1 as output port MOV P0, #00000000B // sets P0 as output port CLR P3. 0 // sets P3. 0 as output for sending trigger SETB P3. 1 // sets P3. 1 as input for receiving echo MOV TMOD, #00100000B // sets timer1 as mode 2 auto reload timer MAIN: MOV TL1, #207D // loads the initial value to start counting from MOV TH1, #207D // loads the reload value MOV A, #00000000B // clears accumulator SETB P3.
0 // starts the trigger pulse ACALL DELAY1 // gives 10uS width for the trigger pulse CLR P3. 0 // ends the trigger pulse HERE: JNB P3. 1, HERE // loops here until echo is received BACK: SETB TR1 // starts the timer1 HERE1: JNB TF1, HERE1 // loops here until timer overflows (ie;48 count) CLR TR1 // stops the timer CLR TF1 // clears timer flag 1 INC A // increments A for every timer1 overflow JB P3. 1, BACK // jumps to BACK if echo is still available MOV R4, A // saves the value of A to R4 ACALL DLOOP // calls the display loop SJMP MAIN // jumps to MAIN loop DELAY1: MOV R6, #2D // 10uS delay LABEL1: DJNZ R6, LABEL1 RET
🔗 External reference
Related Circuits
Techniques for an echo sounder used to measure ocean depth can be implemented with an ultrasonic distance measuring device. This device uses a circuit similar to the one described in the previous article, which includes a series of ultrasonic...
It is well known that many animals are particularly sensitive to high-frequency sounds that humans cannot hear. Many commercial pest repellers based on this principle are available, most of them operating in the range of 30 to 50 kHz....
Infrared light is electromagnetic radiation with longer wavelengths than those of visible light. It is utilized in various industrial, scientific, and medical applications. Most remote controllers employ infrared light to transmit information. This protocol was developed by Philips using...
Using modulated rectangular waves of different time periods, the circuit presented here produces ringing tones similar to those produced by a telephone. The circuit requires four astable multivibrators for its working. Therefore, two 556 ICs are used here. The...
The circuit illustrated below represents a simple thermometer circuit based on the LM335 temperature sensor. This circuit comprises two main components: the LM335 sensor and its adjustment circuitry. The output from the LM335 generates a voltage of 10 millivolts...
Testing whether a transistor is shorted or open is typically performed using an ohmmeter. The test involves checking if current can flow between the base and emitter or the collector. To effectively test a bipolar junction transistor (BJT) for shorted...