
Ultrasonic Range Sensor
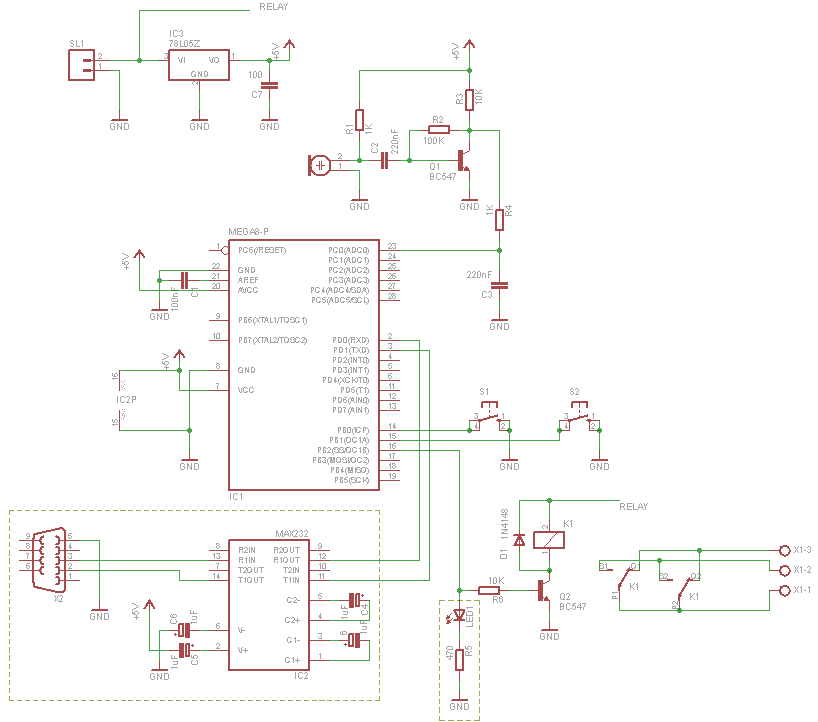
This circuit design illustrates a sophisticated approach to ultrasonic sensing, utilizing a microcontroller to manage signal processing and amplification while ensuring efficient power management through a bridge rectifier and low dropout regulator. The architecture includes critical components such as a ceramic resonator for frequency stability and a piezoelectric transducer for both transmission and reception of ultrasonic waves. The design's focus on minimizing noise and maximizing sensitivity is evident in the choice of Schottky diodes and the careful arrangement of components to avoid interference. The implementation of resonant circuits to optimize signal capture further enhances the system's performance, enabling effective distance measurement in robotic applications. The compact construction and thoughtful shielding solutions demonstrate practical engineering considerations in overcoming challenges associated with component integration and environmental noise. Overall, this circuit serves as a valuable reference for ultrasonic sensor design in embedded systems, showcasing effective techniques for signal processing and power management in compact electronic devices.The Panasonic transducers are no longer available, but the design is still interesting as an example. J1 is the connection to the RCX. D1 - D4 form a bridge rectifier to obtain local power from the RCX which is stored on C7 and regulated to 5V by U1, a low power, low dropout regulator.
The microcontroller, U3 is programmed to generate a burst of 8 x 40KHz pulses on pin 6. Q1 switches current into L1 creating a "flyback" voltage output to Y2, the ultrasonic transmitter, of about 20V peak. The 40KHz is based on a software division of the 10MHz reference (the ceramic resonator, Y1, in this case). Y3, the ultrasonic receiver, is band-limited by L2, to stop normal sound and vehicle vibration from being the dominant input.
L2 is chosen to form a resonant circuit with the self capacitance of the receiver piezo. It should be peaked for 40KHz. U2D and U2A are the primary gain stages to get the millivolt level signals up to a couple of volts. Use of a rail to rail amplifier with symmetrical (1/2 rail) biasing makes overload recovery very efficient for large input overloads from very reflective targets. D8 rectifies the returns on C9. D9 generates a exponential waveform on C6 driven from the initial pulse burst. This forms a comparison input to U2B which outputs a logic "1" whenever a return exceeds a range sensitive threshold.
This design is only interested in the first return (closest object) since the RCX cannot handle a series of returns from different ranges. Both the analog and logic level returns are input to the microcontroller via analog input pin 7 and digital input pin 4.
The current firmware only makes use of the logic input. The microcontroller times the returns and converts them into a varying mark/space squarewave on digital output pin 5. This squarewave is converted to a voltage on C1 and presented to the RCX analog input via R1 and D5/D6 during the RCX`s analog sample time.
Note. The diodes are schottky types to minimize voltage drop, particularly in the bridge. I would be happy to program a 12C671 for anyone interested. I have designed this circuit around a limited range of Rs and Cs to minimize inventory requirements. Other sensors I`m working on use these same values where possible. There is a transmit overload recovery time equivalent to about 6 inches. This seems to be mainly due to mechanical resonance in the mounting of Y2 and Y3. (The average bump sensor should catch anything within 6 inches if the ultrasonic ranger is placed centrally on top of the robot!) This was a category 5 project. Hard work to get the parts into the desired enclosure. I used perforated prototype board, one pad per hole type for the construction. I squeezed this device into the smaller size battery holder. Simply remove the battery clips and switch mechanism. I glued the outer part of the switch back in place for cosmetic reasons. I had one problem with using the battery box. The buss strips radiate a lot of switching noise, from the RCX`s multiplexed power scheme, which is picked up by the input amplifier.
I severed the buss strip so that only the end four power studs are used (the ones furthest from the receiver piezo and input amplifier section. I covered the rest of the buss strips with grounded self adhesive copper foil to act as shielding, followed by a layer of pvc tape to avoid shorting any of the components.
🔗 External reference
Related Circuits
This water level sensor circuit utilizes a standard NAND logic gate to generate oscillation and detect water levels. The oscillation functionality is integrated within the circuit. The water level sensor circuit employs a NAND logic gate to create a square...
The objective of this project is to utilize an inexpensive PIR sensor to detect human movement. A PIC18F25K20 microcontroller is employed to monitor changes in the sensor's state and emit sound through a speaker or piezo buzzer. The microcontroller...
A line follower robot, abbreviated as LFR, is an autonomous robot designed to optically follow a line drawn on the floor. This involves the robot moving along an arbitrary line using a component known as a line sensor. A...
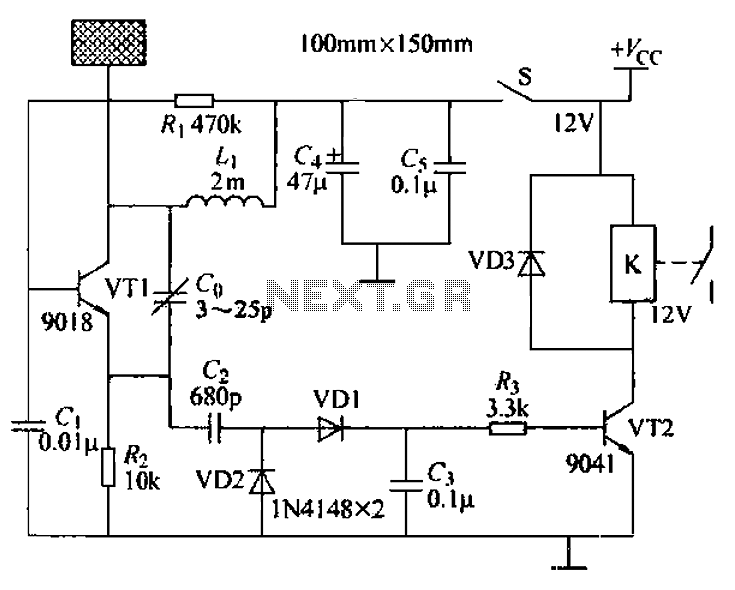
A capacitive proximity controller typically consists of a radio frequency oscillation circuit and a detection plate. The circuit is constructed using discrete components for capacitive proximity sensing detection. The transistor VT1, along with surrounding components, forms a radio frequency...
Bridged resistive sensing elements are commonly used in resistive type sensors and transducers. This type of sensor requires a biasing voltage to operate. The LM10 provides low... Bridged resistive sensing elements are integral components in various resistive sensors and transducers,...
This circuit responds to the presence of any conductive object, including humans. It does not detect object movement but can function as a proximity sensor. The circuit operates on the principle of capacitive sensing, utilizing a capacitor to detect changes...