
Using the MCU Timers
The timer subsystem in microcontrollers serves multiple functions, including event counting, time delay generation, and pulse width modulation (PWM) signal generation. The TCNT counter operates in conjunction with various control registers that configure its mode of operation, such as normal mode, CTC (Clear Timer on Compare Match) mode, or PWM mode.
In normal mode, the TCNT increments on each clock cycle until it reaches its maximum value, at which point it resets to zero. In CTC mode, the timer counts up to a predefined value stored in a compare register (OCR), at which point an interrupt can be triggered, or an output pin can be toggled. PWM mode allows the generation of varying duty cycles for output signals, which is essential in applications such as motor control and signal modulation.
The programmable prescaler plays a crucial role in determining the timer's resolution and maximum count duration. By dividing the system clock frequency, the prescaler allows for longer time intervals to be measured with the same counter width. The selection of the prescaler value is often done via specific bits in a control register, allowing for flexibility in timing applications.
External clock sources can also be utilized, providing additional versatility in timer operations. This is particularly useful in applications requiring synchronization with external events or signals.
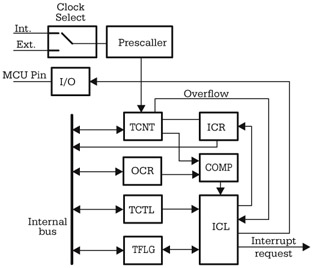
Overall, the timer subsystem's architecture is designed to be highly configurable, allowing for a wide range of applications in embedded systems, from simple timing tasks to complex signal generation and event handling. Understanding the operational principles and configurations of the timer subsystem is essential for effectively utilizing microcontrollers in various projects.Although there are significant variations between different implementations of the general-purpose timer in different microcontrollers, there are many similarities in the principles of operation and the structure of the timer subsystem. The central element of the timer subsystem is a counter, TCNT (8 or 16-bits in length), which may be read or (so
metimes) written by software. The clock for TCNT is obtained either from the system clock, divided by a programmable prescaler, or an external clock applied to one of the MCU pins. The software control upon the timer is performed by means of the. 🔗 External reference
Related Circuits
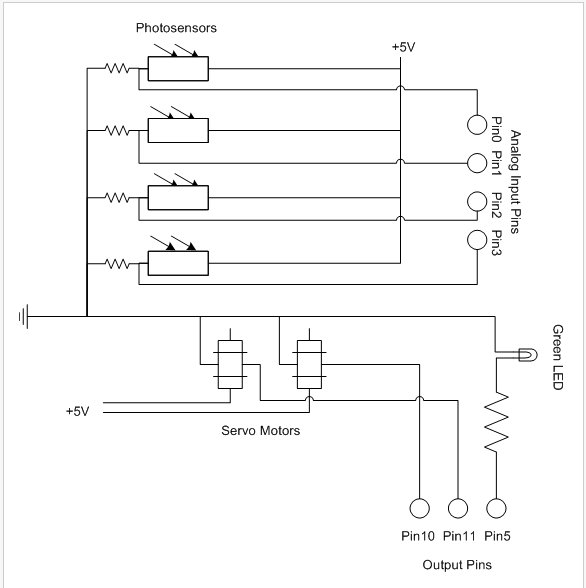
The PhytoBot is a semi-intelligent plant that reacts to external stimuli, specifically light intensity and light location, mimicking the behavior of a phototropic plant. It is designed as an interactive artwork intended for prolonged operation. The motivation behind this...
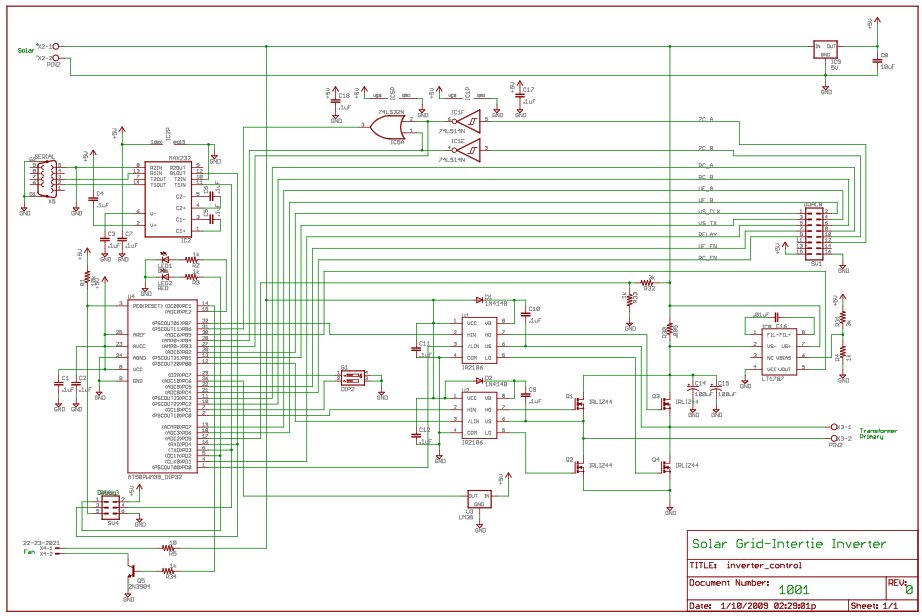
For the last year, a prototype for a solar inverter that can be grid-intertied has been developed. A solar inverter converts 12V DC (or other voltages) from solar panels. The solar inverter is a crucial component in photovoltaic systems, responsible...
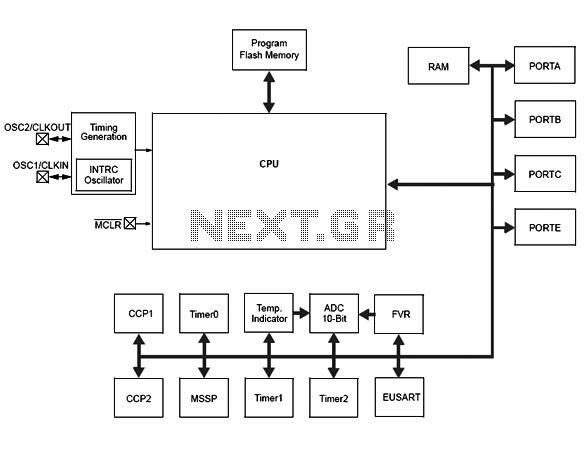
Microchip has announced the availability of new PIC16F1512 and PIC16F151213 XLP microcontrollers. These new XLP (EXtreme Low Power) microcontrollers feature enhanced power management capabilities, making them suitable for battery-operated applications. The PIC16F1512 and PIC16F151213 microcontrollers are designed to operate with...
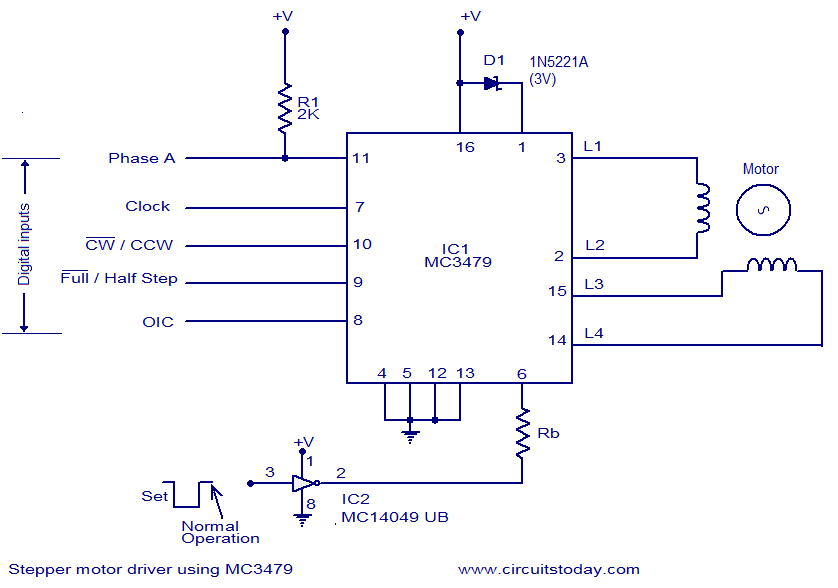
The circuit diagram presented is for a stepper motor driver utilizing the MC3479 integrated circuit from Motorola. The MC3479 is specifically engineered for driving a two-phase stepper motor in bipolar mode and is available in both standard DIP and...

PICLink RS232 low-cost development controller with ADC. The PICLink RS232 embedded controller module provides any microcontroller with RS232 communication capabilities. The PICLink RS232 embedded controller is designed to facilitate communication between microcontrollers and RS232 devices, making it an essential component...
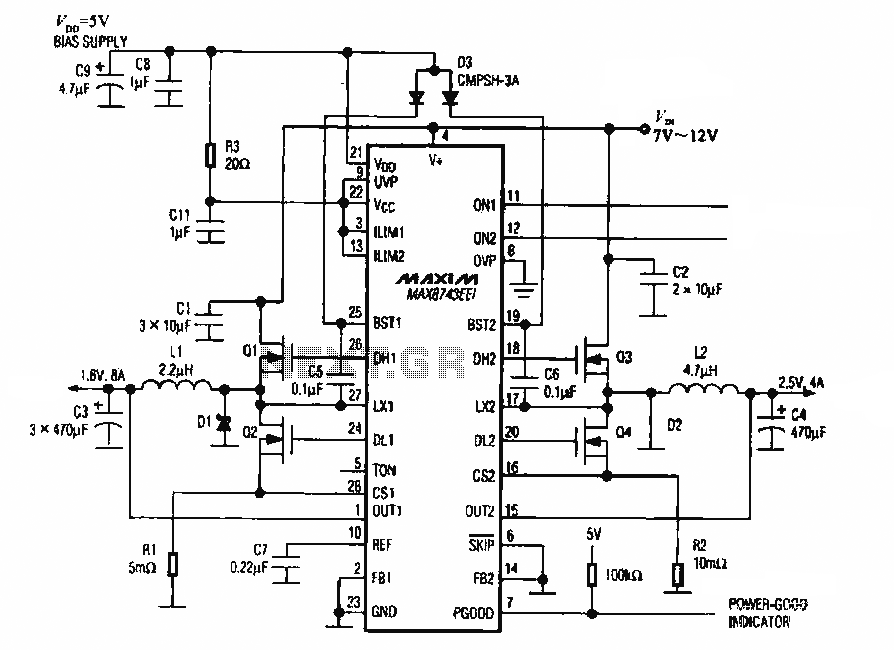
The circuit utilizes the MAX8743 chip for a laptop chipset power supply. It demonstrates the conversion of a 5V power supply into +2.5V and +1.8V outputs. The MAX8743 is a highly integrated power management solution designed specifically for laptop chipsets....