
bi directional motor control

The H-bridge motor controller designed in project 2.S994 utilizes MOSFETs to enable bi-directional control of a DC motor. The configuration allows for the motor to be driven in both forward and reverse directions by switching the polarity of the voltage applied to the motor terminals. Typically, an H-bridge consists of four switches arranged in a bridge configuration, where each switch is represented by a MOSFET.
In this design, two pairs of MOSFETs are used: one pair for the forward direction and the other for reverse. When the control signals are applied, one MOSFET from each pair is turned on, allowing current to flow through the motor in the desired direction. To prevent short circuits, it is essential to ensure that only one MOSFET from each pair is activated at a time. This can be managed by using a microcontroller or a dedicated driver IC that generates the appropriate control signals based on the desired motor direction and speed.
The commercial bi-directional motor controller tested later is likely to feature similar operational principles but may include additional features such as built-in current sensing, thermal protection, and more sophisticated control algorithms for enhanced performance. The Pololu product mentioned is known for its reliability and ease of integration, making it a suitable choice for various robotic applications.
Future updates will include detailed schematics of both the custom H-bridge and the commercial controller, providing insights into the design choices, component specifications, and operational characteristics of each configuration.In 2.S994 we made our own ""h-bridge"" motor controller using MOSFETs to control a motor. We then tried out a commercial bi-directional motor controller on the same motor. Here are pictures of the setup. I will update with schematics / details on the motor controller later. I believe it was a Pololu product. Update:.. 🔗 External reference
Related Circuits
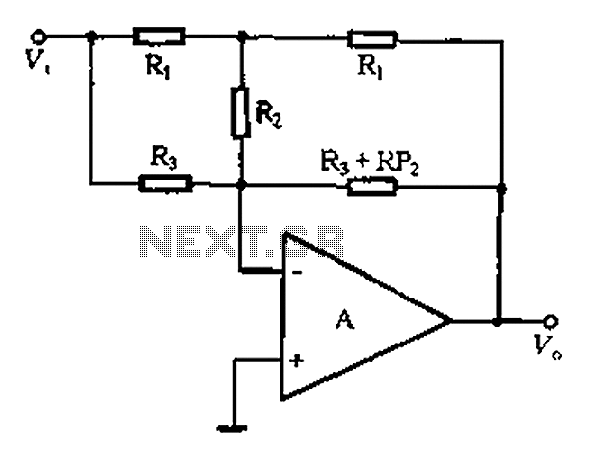
At high frequencies, the capacitor Cz can be considered a short circuit (i.e., the resistance of the RPi is negligible). This is illustrated in Figure 4-6 (a) of the apparatus, which corresponds to the equivalent circuit shown in Figure...
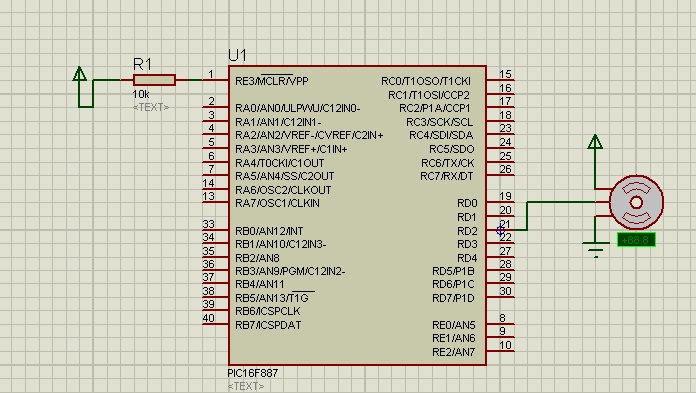
The shaft can be positioned at specific angular positions by sending a coded signal to the servo. As long as the coded signal is present on the input line, the servo will maintain the angular position of the shaft....
This circuit will impose a maximum slew rate on a signal; positive and negative rates can be independently controlled. The circuit is useful in servo applications where the error signal needs to be limited to be within the power...
Involvement is a modified version of the classic circuit of automatic level control signal used in tape recorders. The purchase price of the components (using TL072) does not exceed CZK 60 for a channel. For a range of entry...
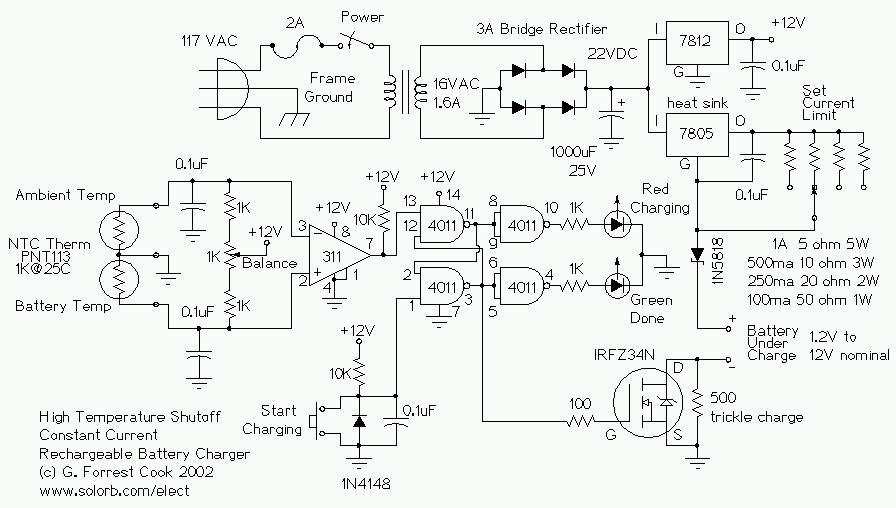
This circuit is designed for a temperature-controlled constant current battery charger, compatible with NiCd, NiMH, and other rechargeable cells. It operates on the principle that most rechargeable batteries exhibit an increase in temperature when they are fully charged. Overcharging...
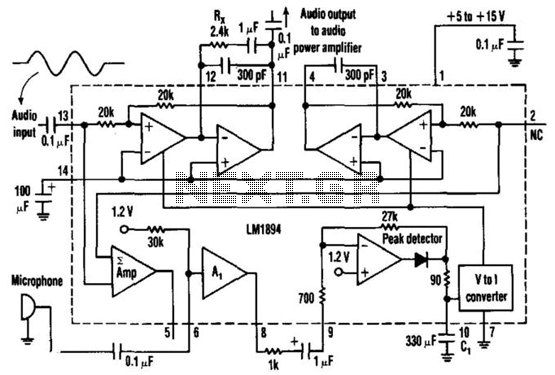
This single-chip circuit adjusts its audio gain according to the ambient noise picked up by the microphone. When operating in a quiet environment, the audio output is quiet, while a noisy environment results in a louder audio output. Audio...