
Line Following Robot Sensor

The line-following robot utilizes an infrared proximity sensor that detects the presence of surfaces or lines beneath it. This sensor typically operates by emitting infrared light and measuring the reflection from nearby surfaces. When the sensor is positioned close to a surface, the reflected light intensity is analyzed to determine whether the surface is present or if the robot is nearing the edge of a path.
The circuit design of the infrared proximity detector may include key components such as an infrared LED, a phototransistor or photodiode, a resistor network for biasing, and an operational amplifier for signal conditioning. The infrared LED emits light, which is reflected by the surface below. The phototransistor or photodiode receives this reflected light; the amount of light detected varies based on the proximity to the surface.
In a typical configuration, the output from the phototransistor is fed into an operational amplifier, which amplifies the signal for better detection accuracy. Additional components such as capacitors may be included to filter noise and stabilize the circuit. A microcontroller can be integrated into the design to process the output signals and control the robot’s movement based on the sensor inputs, allowing the robot to follow lines or navigate around obstacles effectively.
This sensor is particularly useful in robotics applications where precise movement and navigation are required, such as in automated guided vehicles (AGVs) and educational robotics projects. Its small size and simplicity make it an ideal choice for various robotic platforms.This Line Following Robot sensor or surface scanner for robots is a very simple, stamp-sized, short range (5-10mm) Infrared proximity detector wired around. 🔗 External reference
Related Circuits
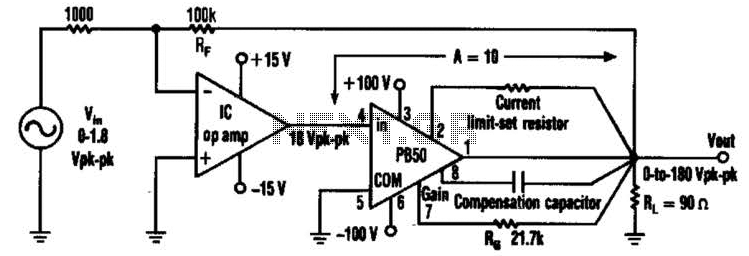
An Apex PB50 Booster Amplifier, along with an integrated circuit (IC) operational amplifier, can be utilized in a high-voltage operational amplifier configuration to convert a small analog signal into a 180-V peak-to-peak signal. Apex Microtechnology produces a variety of...
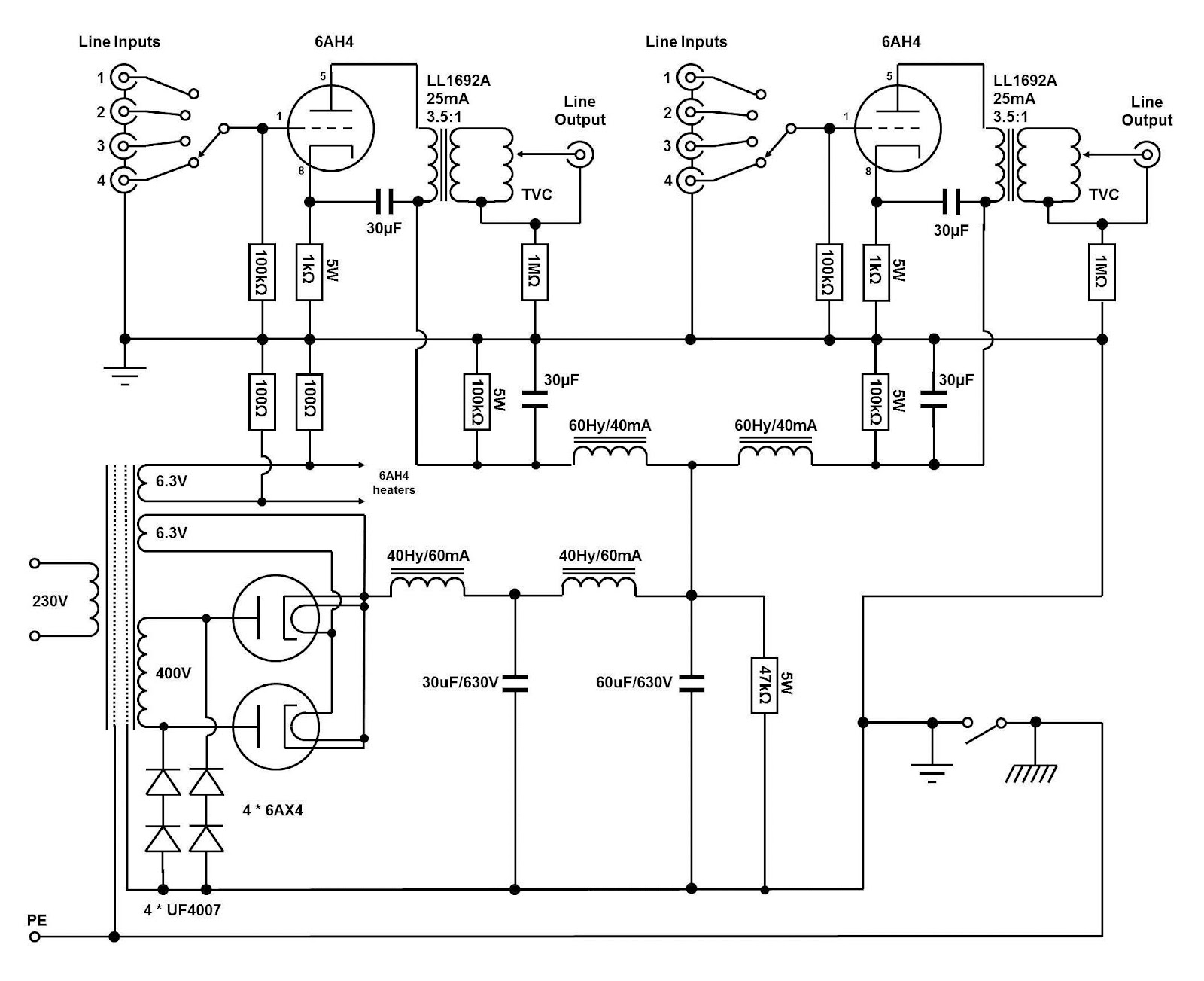
The circuit and assembly process of the line stage is presented in two separate articles. This linestage shares the same circuit as the two chassis version previously described. However, in this design, the power supply and preamplifier are housed...

The single line diagram is a circuit diagram where a "one-line" representation illustrates the three phases of a three-phase power system. In addition to displaying the ratings and sizes of electrical equipment and circuit conductors, a well-drawn one-line diagram...
This simple robot responds to light and avoids obstacles without the need for a microcontroller, programmer, or PC. The only unique component in the circuit is a window discriminator, which functions similarly to a window comparator. Resistors R1 and...

This sensor switch circuit features nine channels and consists of three integrated circuits along with several resistors. The 74HC147, which has a high input impedance, enables the use of 4.7 MΩ resistors to establish a logic level "high" for...
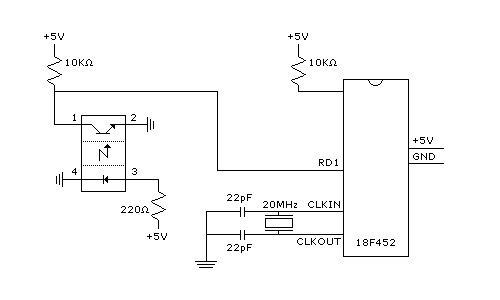
Initially, a PIR Motion Sensor was selected for testing to detect motion in front of the sensor; however, it proved to be insufficiently sensitive. Therefore, a QRD1114 IR Sensor was considered as a substitute. In this test, both sensors...