
Sound-To-Servo Driver

This project involves a circuit that effectively translates audio input into control signals for an RC servo. The fundamental principle is to convert the amplitude of the audio signal into a corresponding servo movement, thereby allowing for dynamic interaction based on sound levels.
The circuit can be broken down into several key components: an audio input stage, a signal processing unit, and the servo control output. The audio input stage typically includes a microphone or line-in jack to capture the audio signal, which is then amplified to ensure adequate signal strength for processing. A band-pass filter may be employed to isolate the relevant frequency range of the audio input, ensuring that only the desired sound frequencies are utilized for servo control.
The signal processing unit is responsible for analyzing the amplitude of the audio signal. This can be achieved using an envelope detector or a peak detector circuit, which converts the audio waveform into a DC voltage that corresponds to the loudness of the sound. This voltage is then used to modulate the pulse width of the control signal sent to the servo. The width of the pulse determines the extent of the servo's movement, allowing for nuanced control based on the input audio's amplitude.
The final output stage involves the generation of PWM (Pulse Width Modulation) signals that drive the RC servo. The pulse width is adjusted according to the detected audio amplitude, translating the sound level into physical movement. Typical pulse widths for RC servos range from 1 millisecond to 2 milliseconds, corresponding to the servo's range of motion.
It is crucial to ensure that the voltage levels of the control signal remain within the specifications of the servo to prevent damage. The circuit may also include a protection mechanism, such as a zener diode, to safeguard against voltage spikes. Overall, this project presents an innovative approach to integrating audio signals with electronic movement, enabling the creation of interactive and animated devices.This page describes a project that takes an audio signal and uses it to drive a RC servo. The louder the sound, the more the servo moves. The most obvious application of this is to make your own mouth animation for talking and singing creatures. Ray Martin is a friend of ours who designs toys for a living, sometimes electronic, sometimes mechanic
al. We were having lunch after the TRW Amateur Radio Club swap meet, and I mentioned that some of the best hackable products with animated mouths were discontinued, and Halloween lovers were constructing singing and talking props out of alternative things like servos. Ray said, "I have a circuit that does exactly what you need on my desk right now!" Ray went further than that.
He customized the design for specific servo limits and pulse frequency, built a prototype and tested it, and sent me the details. The rate at which these pulses are sent isn`t terribly important - only the width of the pulse. Some typical rates are 400 Hz (2. 5 mSec pulse spacing) and 50 Hz (20 mSec pulse spacing). The driving pulse is usually specified as 3-5 Volt Peak to Peak, but I suspect that in many cases you can get by with whatever power the motor is getting.
I would avoid using a drive pulse greater than the motor power. 🔗 External reference
Related Circuits

The LM111 comparator can be utilized to design a relay driver with a TTL strobe, which enhances control over the relay driver. The strobe signal can be used to manage the relay operation more effectively. The LM111 is a high-speed...
Whenever there is a need for battery-powered lighting, such as for camping, solar-powered cottages, cars, boats, planes, or emergency situations, fluorescent lamps are highly appealing. They are significantly more efficient than incandescent lamps, producing much more light for less...
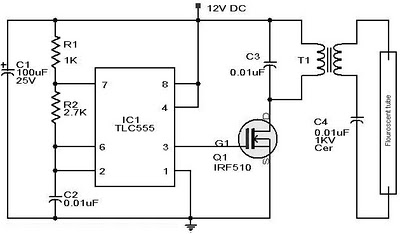
Whenever there is a need for battery-powered lighting, such as for camping, solar-powered cottages, cars, boats, planes, or emergency situations, fluorescent lamps are highly appealing. They are significantly more efficient than incandescent lamps, producing much more light for less...
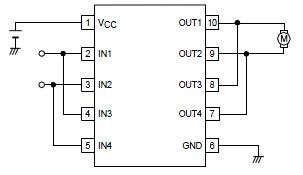
A simple forward-reverse motor control driver electronic circuit can be designed using the LB1948M, a two-channel low saturation voltage forward-reverse motor control driver IC. The LB1948M motor driver is suitable for use in 12V system products and can drive...
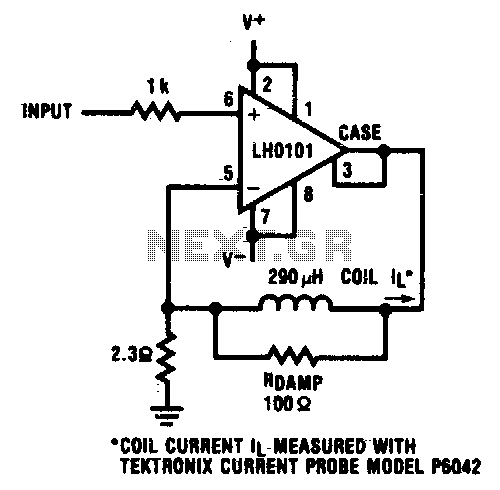
A 500 mV peak-to-peak triangular waveform centered around ground is applied to the amplifier, resulting in a peak current of 100 mA flowing through the inductor. The circuit involves an amplifier configured to process a triangular waveform signal with a...
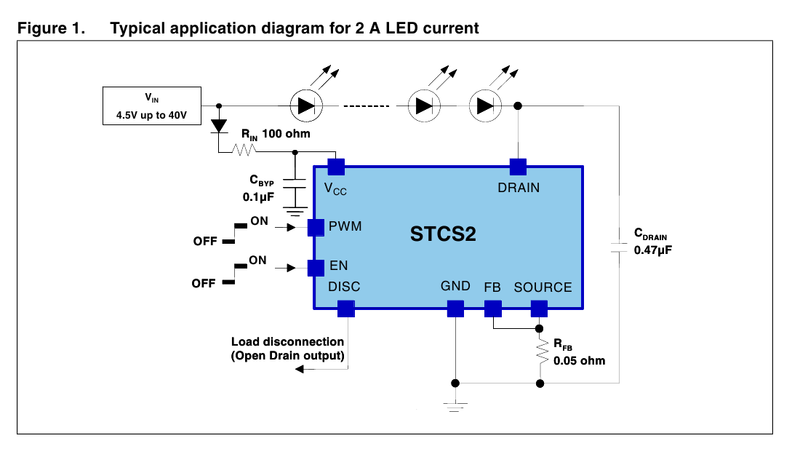
A driver based on the STCS2 for a 445nm laser is being developed. The STCS2 was selected due to its low voltage drop, and the power supply will consist of two lithium-ion cells. The STCS2 is a highly efficient, low-dropout...