
Ultrasonic Distant Obstacle Detector

Obstacle detectors are essential components in robotic systems, designed to enhance navigation and safety by identifying and responding to physical barriers in the robot's environment. These sensors can be categorized into three primary types: ultrasonic sensors, infrared sensors, and LIDAR systems, each with its unique operational principles and applications.
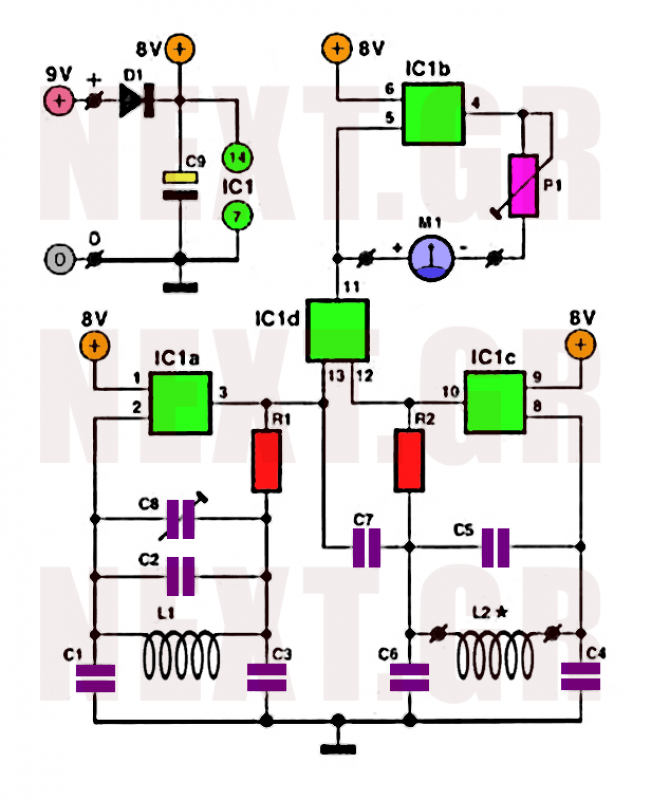
Ultrasonic sensors operate by emitting high-frequency sound waves and measuring the time it takes for the echo to return after bouncing off an obstacle. This time delay is then converted into distance, allowing the robot to detect objects within a specified range. These sensors are particularly effective in indoor environments and can be used to avoid collisions with stationary or moving obstacles.
Infrared sensors, on the other hand, utilize infrared light to detect obstacles. They emit infrared radiation and measure the intensity of the reflected light. When an object is in proximity, the amount of reflected light changes, indicating the presence of an obstacle. Infrared sensors are commonly used in line-following robots and applications where quick response times are required.
LIDAR (Light Detection and Ranging) systems represent a more advanced form of obstacle detection. They use laser pulses to measure distances with high precision. By scanning the environment and creating a detailed map, LIDAR systems can identify obstacles with great accuracy, making them suitable for complex navigation tasks in dynamic environments.
In summary, the choice of obstacle detector depends on factors such as the environment, required precision, and the nature of the obstacles to be detected. Each sensor type has its advantages and limitations, and selecting the appropriate one is crucial for effective robotic operation and navigation.The first sensor a robot usually gets fitted with is an obstacle detector. It may take three different forms, depending on the type of obstacle you want t.. 🔗 External reference
Related Circuits
Precious metals can sometimes be buried too deep to be detected without complex devices. However, smaller pieces of precious metals located near the surface can often be found using simpler methods. Many individuals are drawn to the prospect of...
This circuit utilizes the principle of capacitance between two plates to detect when multiple sheets of paper are placed between the sensing electrodes simultaneously. CI is the sensing capacitor, composed of two plates measuring 2 inches by 15 inches...
The circuit operates on the principle of detecting smoke produced during a fire, which passes between a light bulb and a light-dependent resistor (LDR). As smoke obscures the light, the amount of light reaching the LDR decreases, resulting in...
This circuit is designed for sound detection and generates an output signal when sound is detected. This output can trigger another circuit that activates an alarm, making it suitable for security applications. The circuit employs a condenser microphone to...
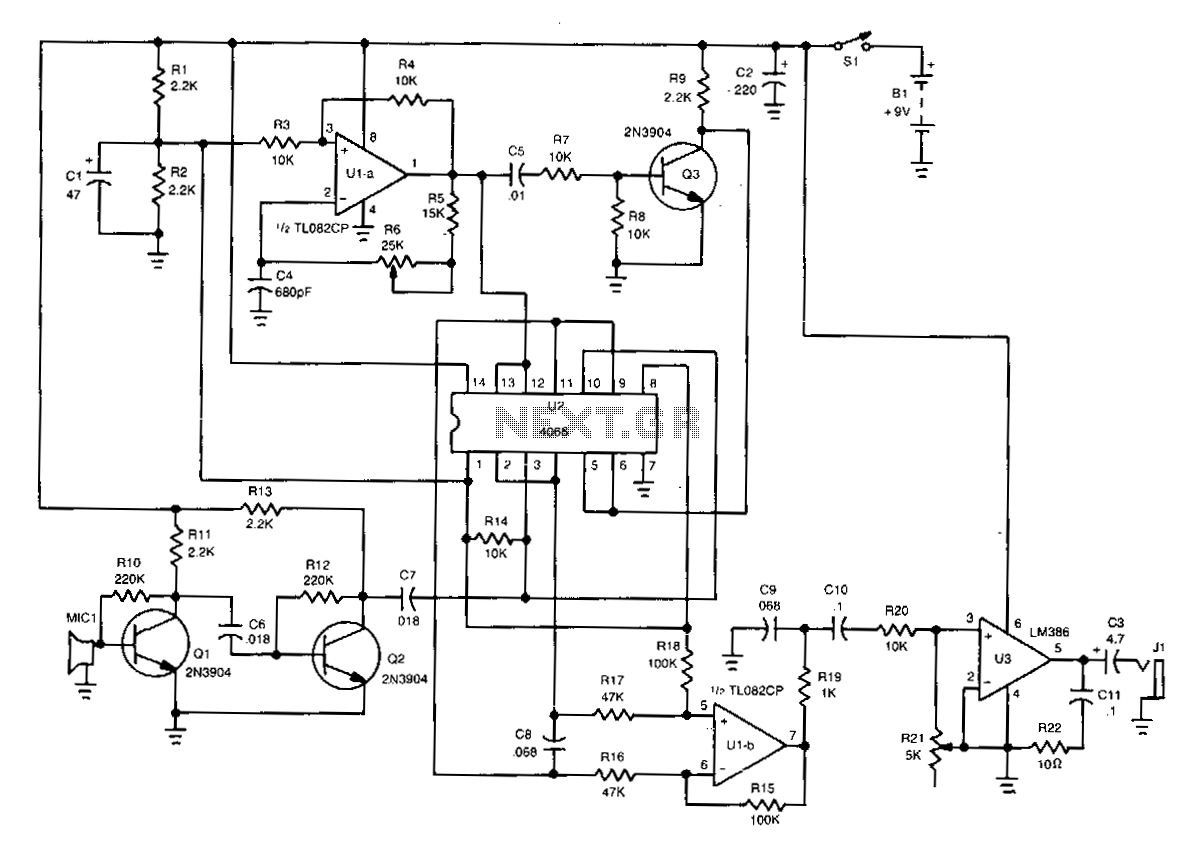
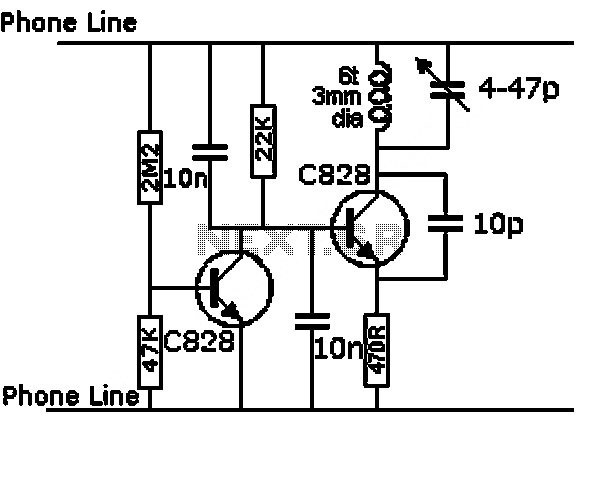
The piezo speaker, MIC1, detects the incoming ultrasonic signal and transmits it to the base of Q1. A two-transistor booster amplifier composed of Q1 and Q2 amplifies the signal to a level adequate for driving one input of this...
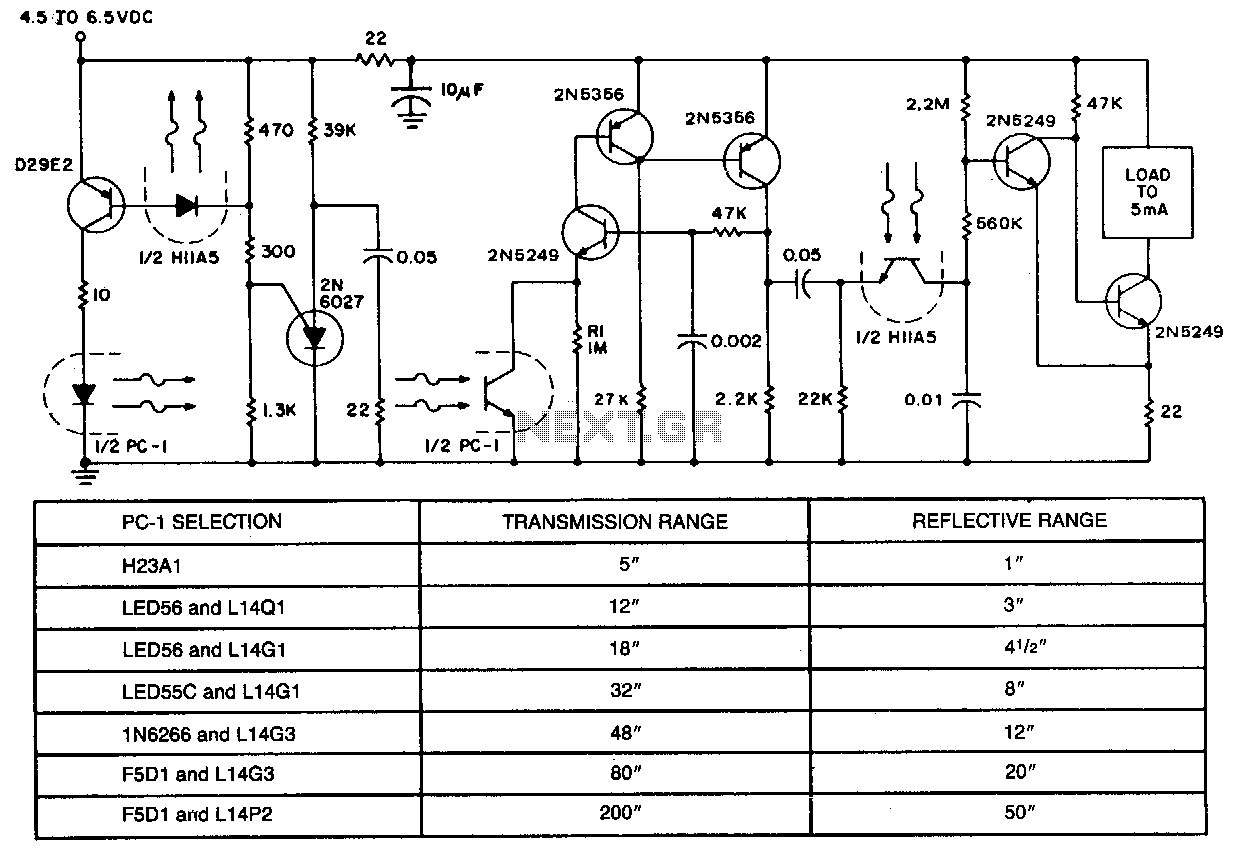
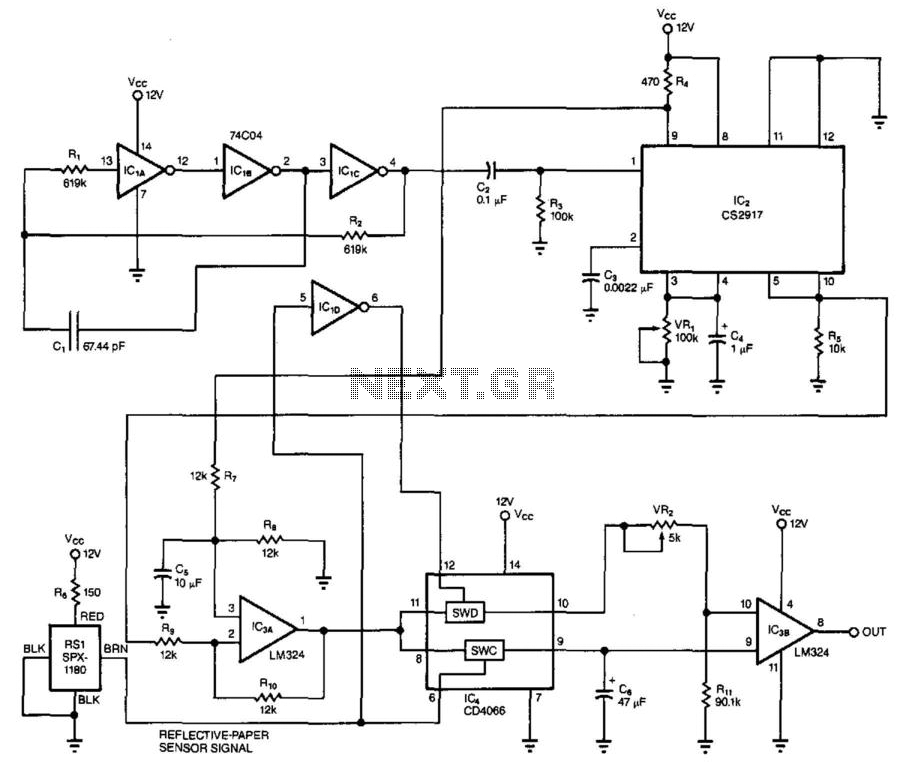
In applications requiring long-range operation with infrared (IR) light sources and high system reliability, pulsed-mode operation of the IR source is essential. Enhanced operational reliability is achieved through synchronous detection of the photodetector current, as implemented in this circuit....