
Stepper Motor Encoder Circuit
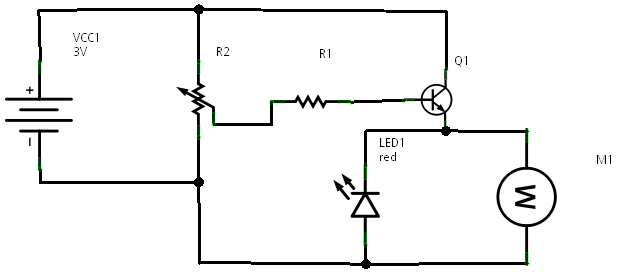
The described circuit utilizes an operational amplifier (op-amp) configured with bipolar stepper motor feedback to create a basic rotary encoder. The op-amp serves as a comparator, where the feedback from the stepper motor's coils is processed to determine the direction of rotation. The inclusion of two diodes in the feedback loop allows for separate paths for positive and negative feedback, enabling the circuit to differentiate between the two states based on the polarity of the output.
In this configuration, when the stepper motor produces a positive voltage output, the upper transistor is activated, illuminating one of the two LEDs. Conversely, when the output is negative, the lower transistor is triggered, lighting the other LED. This visual feedback indicates the direction of rotation, with each LED corresponding to a specific state of the motor's position.
The resistor (R) in the circuit plays a critical role in establishing a dead band at low frequencies. By adjusting the resistance value, the circuit can be tuned to prevent both LEDs from being illuminated simultaneously when the motor is at rest or rotating very slowly. This feature enhances the precision of the encoder by ensuring that it only registers distinct states during motion.
For optimal performance, the circuit can be adjusted for different output frequencies by modifying the capacitor (C) value. The original design specified a 100kΩ resistor and a 470nF capacitor, allowing the circuit to respond to rotations as slow as one-third of a revolution per minute (RPM). Reducing the capacitance will enable the circuit to handle higher frequencies, thus improving the responsiveness of the encoder.
To visualize the operation of the encoder, an oscilloscope can be employed in X-Y mode, where one output is connected to the X-axis and the other to the Y-axis. This setup will display the encoder's states as the motor rotates, illustrating the transitions between the various states (A, B, C, D) and providing insight into the encoder's performance in both clockwise and counterclockwise directions.
It is important to note that while this circuit can effectively utilize a stepper motor as a rotary encoder, there are inherent limitations, particularly at low speeds where output may be minimal. This necessitates a careful balance between high-speed and low-speed operation. In contrast, conventional encoders often employ optical sensors, which can provide consistent performance across a wider range of speeds, although they may introduce jitter at lower velocities.The circuit is a simple op-amp but with two diodes (the transistor b-e junctions in the feedback to split the feedback for positive and negative outputs. On positive output from the stepper coil the top transistor tuns on, on negative, the bottom. One or other LEDs lights for each polarity. Resistor R can be omitted: its function is to allow a dead band at the centre/low frequency. Without it one or other LEDs is always on. With it, output C will be at centre point for very low rotation or stopped stepper. It is quite possible to use a small stepper motor as a rotary encoder. Here's a circuit I knocked up when, I was designing automatic welding machine controls, as a feasibility study. In fact the idea was never used, so I never designed logic to process the signals. It uses a bipolar stepper (with two windings, or 'phases'). Only one phase of the stepper is shown here - you will need to duplicate this circuit for the second winding.
In the original we had R at 100K and C as 470n: the circuit responded as low as 1/3 r.p.m. You will have to reduce C for higher output frequencies. If you use a scope in X-Y mode with Y deflection on one circuit output 'Z' and X on the other circuit, you can clearly see the states of the 'encoder' as in the state diagram below. At A both outputs are high, and at C both are low. At rest (with R present) it is at state O. When rotating the points A,B,C,D can all be seen and will occur in one direction for clockwise rotation or reversed for anticlockwise.
The problem with a stepper (or any other motor) used as a generator is that at very slow speeds it gives virtually no output - so there is a problem with slow speeds. You have to make some sort of trade off between high speed and low speed performance. Proper encoders use optical switches which work at any speed. Of course their problem at slow speeds can be jitter. 🔗 External reference
Related Circuits
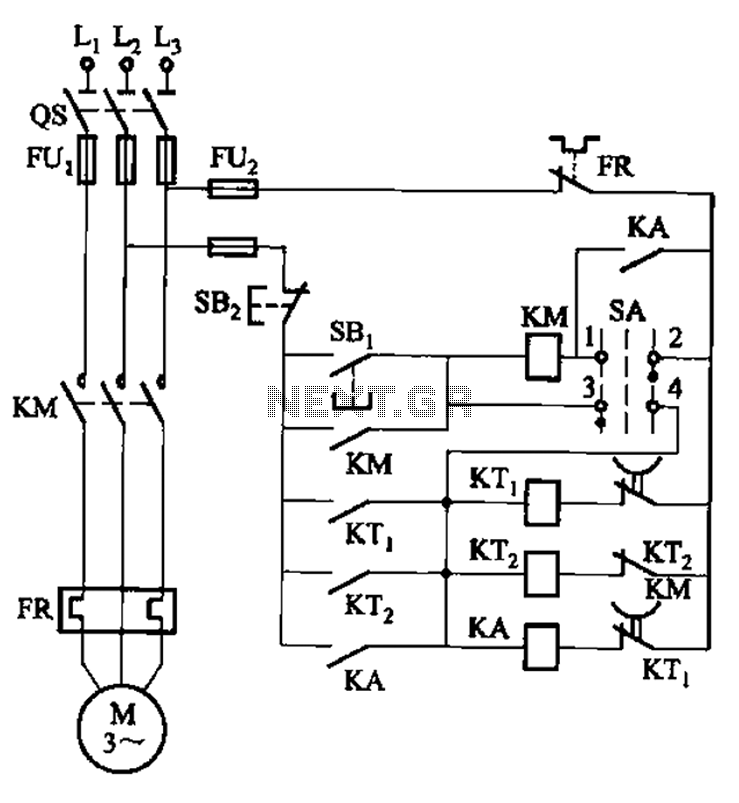
The circuit illustrated in Figure 3-78 utilizes two relays for automatic control, featuring a more complex line structure. This configuration allows for intermittent motor operation. Additionally, it can operate continuously when switch SA is positioned to the right. The circuit...
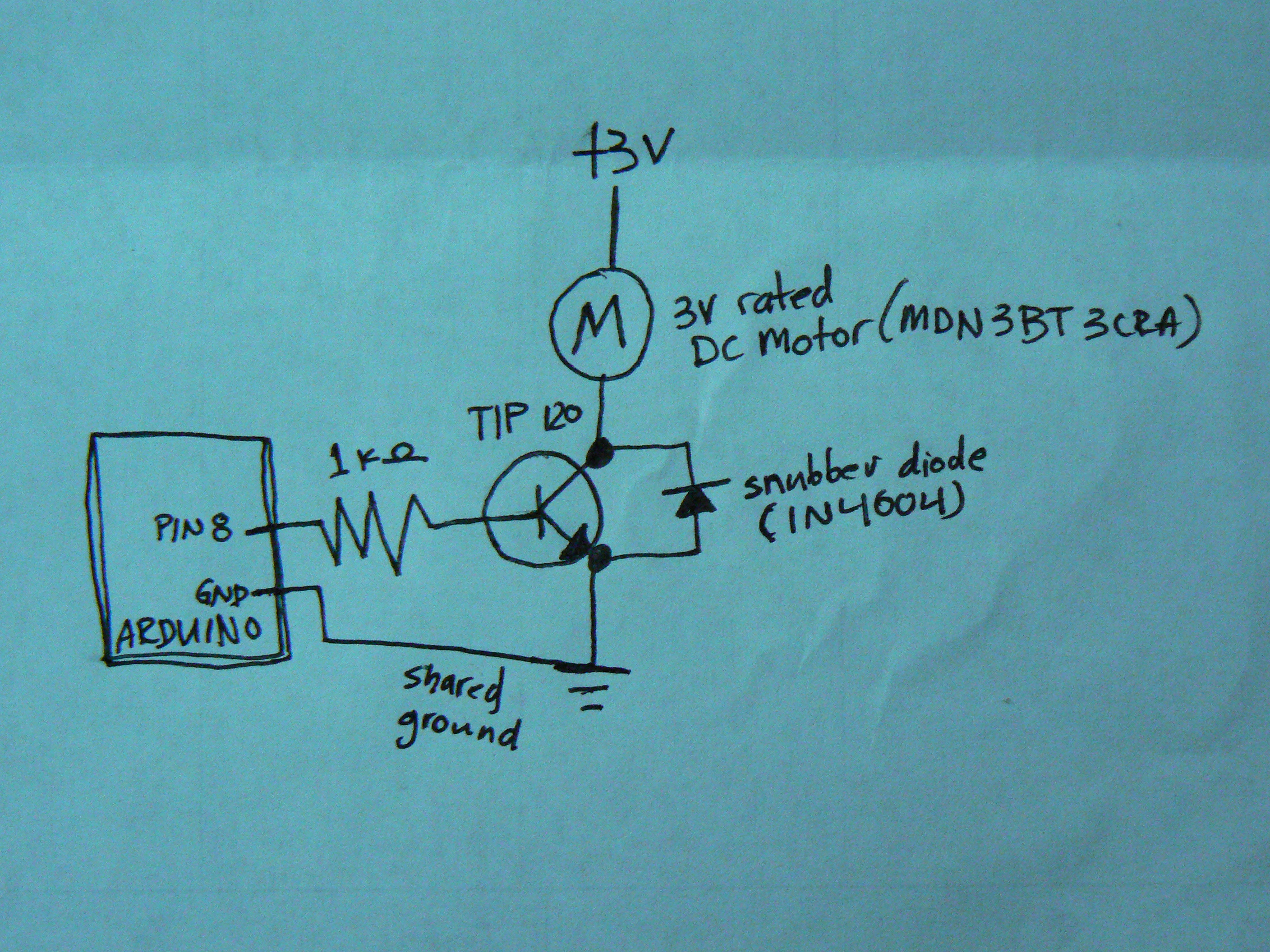
When controlling motors with a microcontroller, the snubber is quite important. This configuration is not commonly seen, as the snubber is typically placed across the motor itself. The general concept is that charge builds up on the motor coil,...
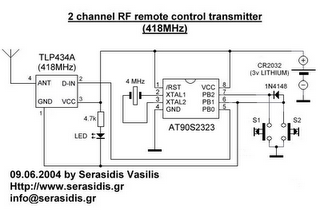
The following circuit illustrates a 3V power supply designed for an RF remote control circuit. This circuit is based on the AT90S2323 integrated circuit (IC). Features include a data rate of 2400 bps. The 3V power supply circuit for the...
In a prior post titled "Timing is Everything," the application of PWM (Pulse Width Modulation) signals for controlling devices such as LEDs was discussed. This technique is particularly beneficial when working with digital devices, including microchips and microcontrollers, which...
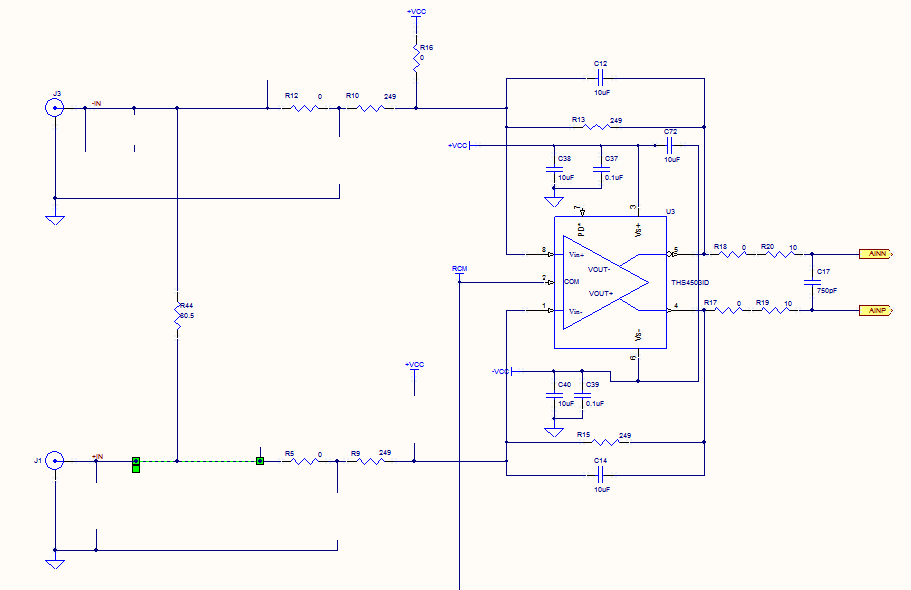
Prior to the test point, there is an AD744 operational amplifier with its output connected to a 10nF capacitor. Following this, a 1kΩ resistor connects to ground. From the junction where the capacitor and resistor meet, a 4.7kΩ resistor...
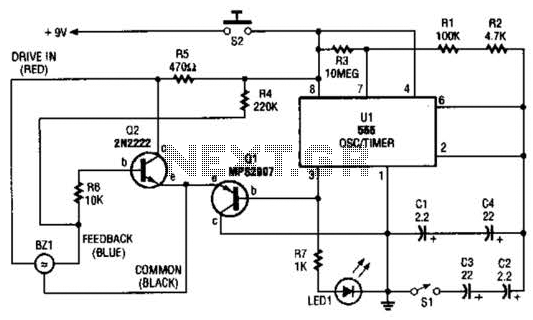
The electronic darkroom timer is constructed using a 555 oscillator/timer, a pair of general-purpose transistors, a buzzer, and an LED. The 555 timer (U1) is set up as an astable multivibrator, functioning as a free-running oscillator. The frequency of...