
Bipolar stepper motor
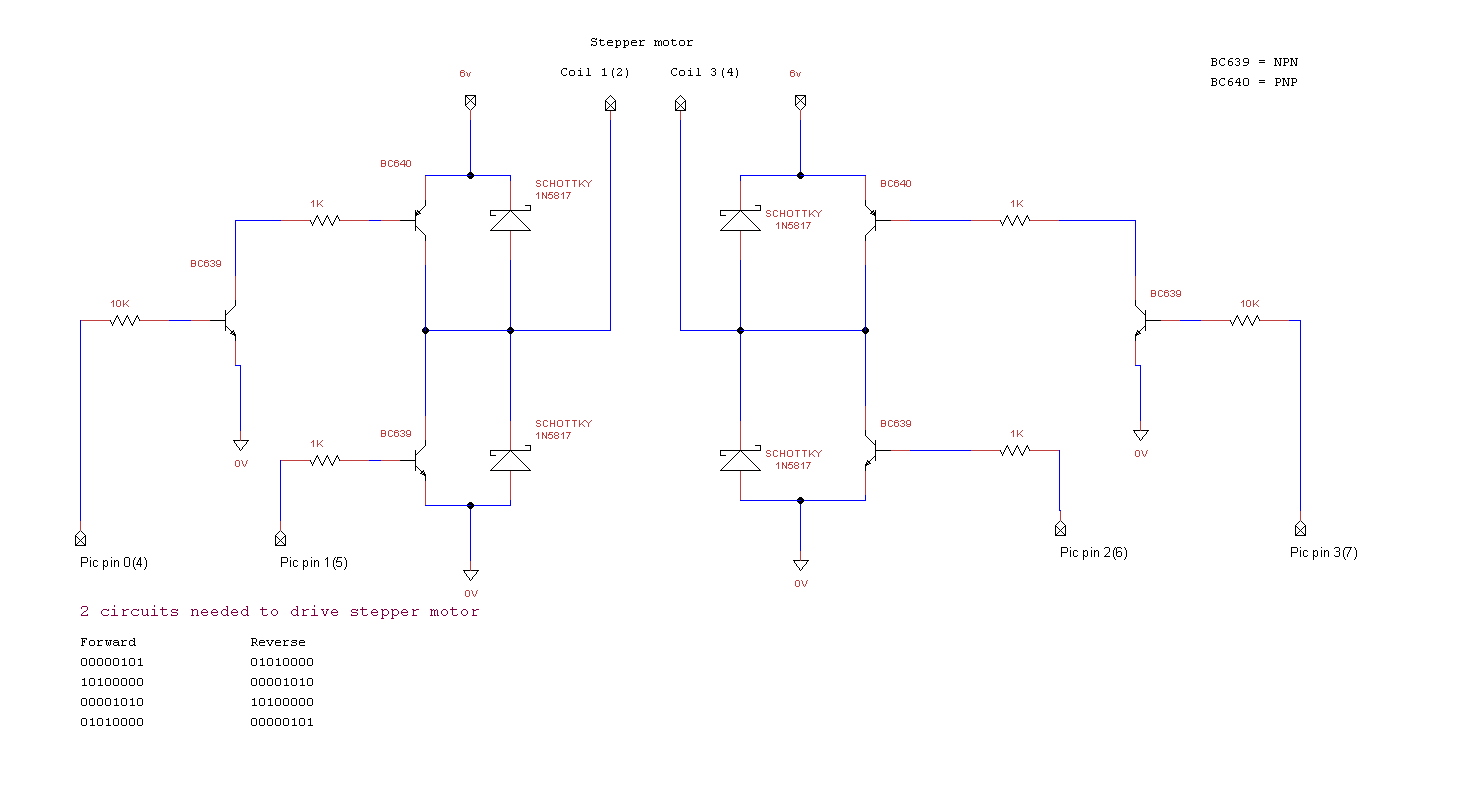
The project involves utilizing a PIC microcontroller to control a bipolar stepper motor, which is commonly used in robotics and automation applications due to its precise positioning capabilities. The control of the stepper motor is achieved through an H-bridge circuit or specifically using the L298 dual H-bridge driver IC.
In this setup, the PIC microcontroller generates pulse-width modulation (PWM) signals that dictate the stepping sequence of the motor. The bipolar stepper motor requires alternating current in two coils to achieve rotation in either direction. The H-bridge or L298 allows the microcontroller to control the direction of the current flow through the motor coils, enabling precise control over the motor's movement.
The circuit typically includes the following components:
1. **PIC Microcontroller**: Acts as the central control unit, programmed to output the necessary signals for motor control.
2. **L298 H-Bridge Driver**: This IC contains two H-bridges, allowing it to control two motors or a single bipolar stepper motor. It can handle significant current and voltage, making it suitable for driving motors.
3. **Bipolar Stepper Motor**: The motor is characterized by its two coils, which are energized in a specific sequence to produce rotational motion.
4. **Power Supply**: Provides the required voltage and current to the L298 and the stepper motor.
5. **Control Circuitry**: This includes resistors, capacitors, and possibly diodes to protect the circuit and ensure stable operation.
The operation begins with the PIC generating a series of digital signals that correspond to the required stepping sequence. The L298 receives these signals and controls the power delivered to the motor coils. By adjusting the timing and sequence of the signals, the speed and direction of the motor can be controlled effectively.
It is essential to consider the specifications of the stepper motor and ensure that the L298 is capable of handling the motor's current requirements. Additionally, proper heat dissipation measures should be incorporated, as the L298 can generate heat during operation.
This configuration enables a robust and efficient system for driving a bipolar stepper motor, suitable for various applications in robotics and automation where precise control of movement is essential.miRover. This pages details how to use a PIC microcontroller and an H-bridge or a L298 to drive a Bipolar stepper motor 🔗 External reference
Related Circuits
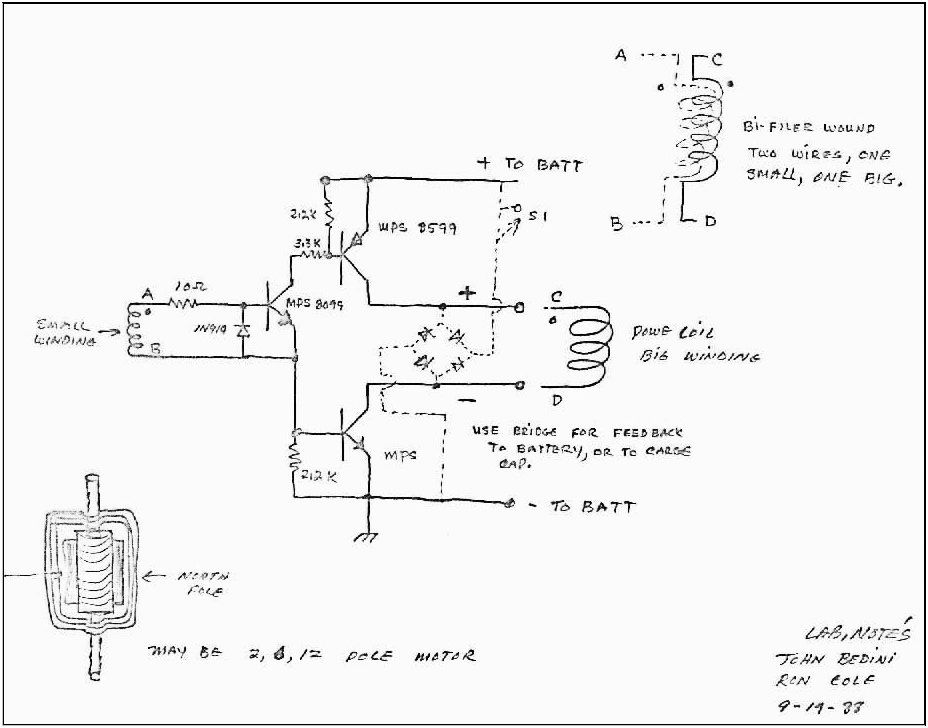
The modification includes two trigger coils, two power coils, and one reed switch. The wheel is equipped with four north pole magnets, which generate nine radiant pulses per rotation. The described circuit features a configuration designed to harness electromagnetic induction....
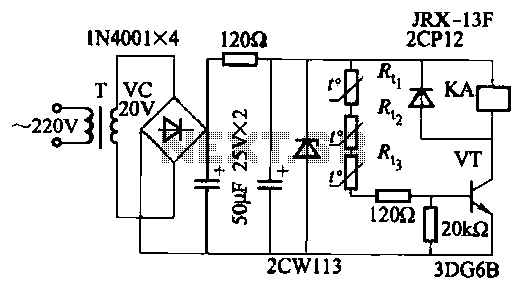
The semiconductor thermistor is an embedded thermal protection element that is sensitive to temperature, with a temperature error of 5. It is reliable, compact in size (diameter of 3.5 mm), and easy to install and embed in windings, making...
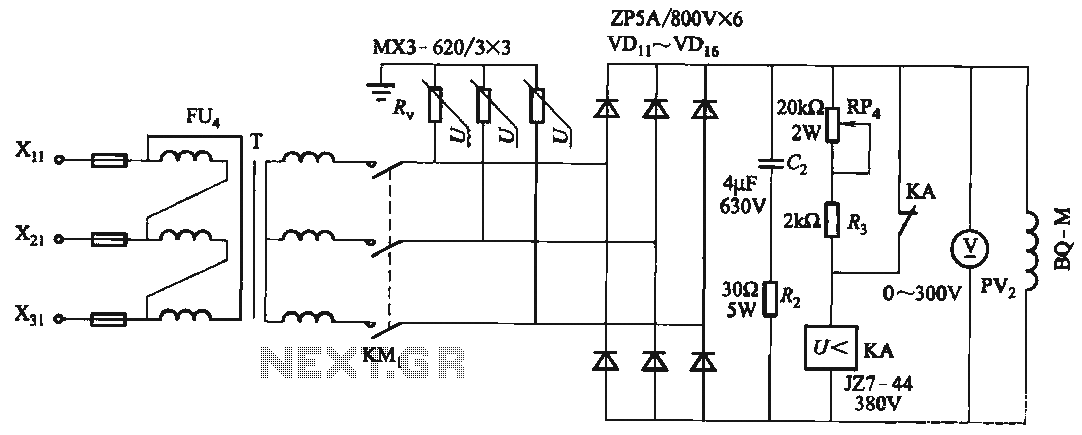
FIG T is the excitation transformer, R is a varistor, and there are rectifier diodes to protect against breakdowns from VDii to VD16; Rz and C2 provide resistive-capacitive protection. The circuit is designed to absorb voltage from the magnetic...
These circuits could be used as the basis for Model Railroad DCC Boosters or PWM motor controllers. The first schematic is for a basic 3 Amp - DCC Booster using the LMD 18200 CMOS, H-Bridge. Included in the design...
It's basically a photovore with a couple tactile sensors. It's rather complex but can give neat behaviors with modifications to the circuit. At this point I don't have any plans to give more information on this circuit so your...
The challenge is to control the speed of the motor. One approach is to use a plane, radio, and speed control integrated with the motor, but this is not ideal. Alternatively, mounting the motor on a bench and directly...