
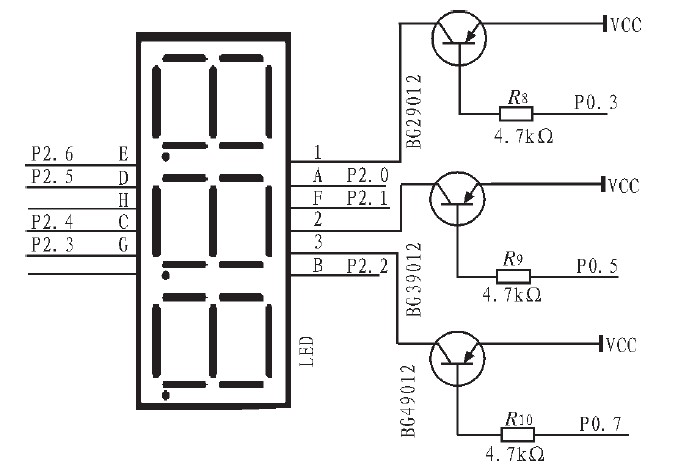
Cipher scheme on the basis of the ultrasonic ranger of AT89C52
The ultrasonic range-finding system operates on the principle of measuring the time delay between the emission of an ultrasonic pulse and the reception of its echo. This time delay is directly related to the distance between the ultrasonic transducer and the target object. The system's accuracy is enhanced by implementing a temperature compensation algorithm that adjusts the calculated distance based on the ambient temperature, which affects the speed of sound in air. The DS18B20 temperature sensor is integrated into the system to provide real-time temperature readings, allowing for dynamic adjustments during operation.
In terms of hardware architecture, the system consists of a microcontroller unit (MCU), which manages the overall operation, including pulse generation, timing, and data processing. The ultrasonic transducer emits a high-frequency sound wave, which travels through the air until it encounters an object, reflecting back to the transducer. The MCU measures the time taken for the echo to return and, using the known speed of sound (adjusted for temperature), calculates the distance to the object.
The design also incorporates an echo microphone, which is sensitive to the incoming reflected waves. The configuration of the microphone and transducer must be optimized to ensure maximum sensitivity and minimal interference from ambient noise. The system can be calibrated for various reflective surfaces, ensuring reliable operation in diverse environments.
To further enhance measurement reliability, the system can employ multiple transducers arranged in an array, allowing for simultaneous measurements from different angles. This multi-channel approach can mitigate the effects of obstructions and improve the overall accuracy of the range-finding process.
In conclusion, the ultrasonic range-finding technology described is a versatile and effective method for distance measurement in various applications, leveraging temperature compensation and advanced signal processing techniques to achieve high accuracy and reliability.The technology of range finding employs extensively in civil, industrial fields such as measuring, medical flaw detection, car anticollision of position of the material, etc. , because the ultrasonic speed wants to the velocity of light it is much smaller, its flight time is easier to measure, and easy directional transmission, directivity is good,
the emission intensity is easy to control, and is free of electromagnetic disturbance, therefore utilize ultrasonic range finding to be a valid non-contact type range finding method. But the propagation velocity under different ambient temperature of supersonic wave is different, such as neglecting temperature effect, will influence final survey accuracy.
The ultrasonic ranger that this text introduces adopts the detecting method of transition time, has used DS1 8B20 temperature sensor to gauge on-the-spot temperature, and calculate and realize the temperature compensation of the wave speed through the software and dispel the impact on measuring result of the temperature, make the error in emasurement reduce. 4 factors that the measurable distance of maximum of limiting this system exists: Ultrasonic range, reflected texture, reflecting and incidenting the degree of sensitivity of included angle and echo microphone among the acoustic wave.
The echo microphone determines the minimum measurable distance about the pulsing direct receiving capability of the acoustic wave. It is metric coverage for increasing, be lasted error in emasurement, it can if you can`t adopt, launch supersonic waves multi-channel separately a plurality of ultrasonic transducer /design method that be received.
It is an acoustic wave range because of supersonic wave, its wave speed c is temperature-dependent, through measuring the relation of obtaining ultrasonic wave speed and temperature, as shown in Table 1. During range finding, can after wave speed c. wave speed confirm their, through the automatic detection ambient temperature of the temperature sensor, confirm, so long as measure time t with round supersonic wave, can try to get the distance H, can obtain this environment and make the journey that supersonic wave passes more accurately in this way, have improved the accuracy of measurements.
Use the detecting method of transition time in this cipher scheme, the operating principle of the ranger is: While the one-chip computer sends out the driving signal, turn on the time-recorder in the one-chip computer, begin to time. Visit supersonic wave of penetrating of the hair in transmission, when being stopped the idea of the time-recorder of the one-chip computer when receive the probe to receive the first back wave, because the speed of supersonic wave in the air has already known, can try to get the probe and distance to be examined between the goals according to the formula.
Moreover, can send out ultrasonic measurement many times within relatively short time and finish, calculate then reveals for mean value. Supersonic wave is in the identical spread media Atmospheric condition The propagation velocity is the same, namely the velocity of sound does not vary with frequency within the range of significant frequency, but the higher its frequency is, the more terribly decay, the shorter the travelling distance is.
Consider actual engineering survey requires, while designing the ultrasonic ranger, choose the frequency f =The supersonic wave of 40kHz, the wavelength is 0. 85cm. The technology of range finding employs extensively in civil, industrial fields such as measuring, medical flaw detection, car anticollision of position of the material, etc.
, because the ultrasonic speed wants to the velocity of light it is much smaller, its flight time is easier to measure, and easy directional transmission, directivity is good, the emission intensity is easy to control, and is free of electromagnetic disturbance, therefore utilize ultrasonic range finding t 🔗 External reference
Related Circuits
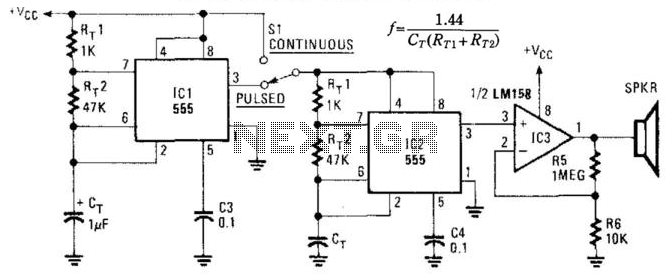
This circuit utilizes two NE555 timer IC devices to generate either pulsed or continuous ultrasonic signals. The values of CT for both pulse rate and ultrasonic frequencies can be calculated accordingly. SPKR refers to a small hi-fi tweeter. The circuit...
IC2 is a stable oscillator whose frequency and pulse width are determined by the values of R4, R5, R6, and C4. R4 is adjustable for precise frequency setting. The output from IC2 is at pin 3, which is capacitively...
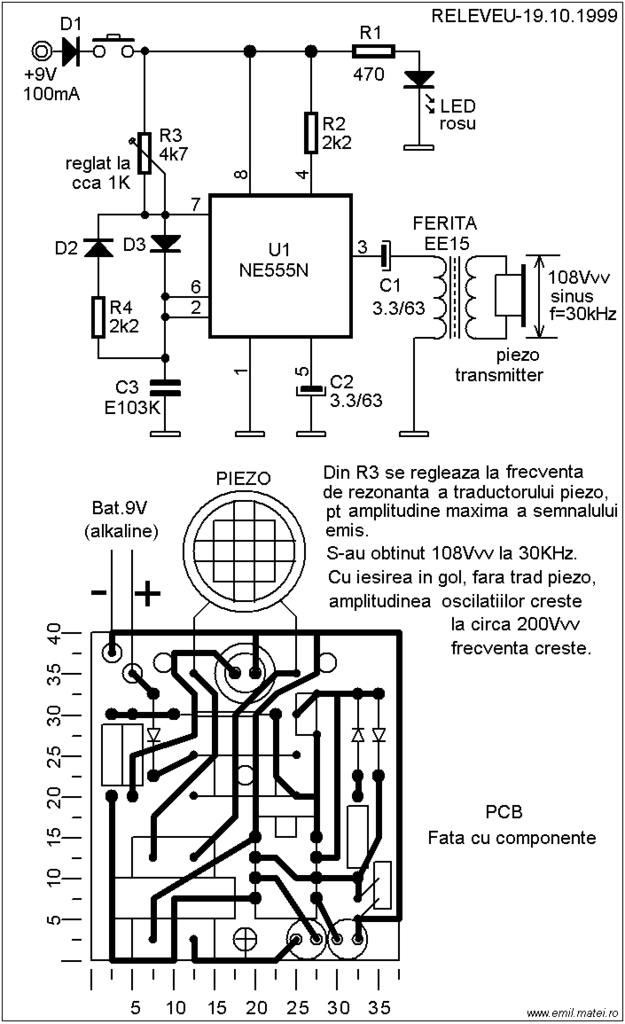
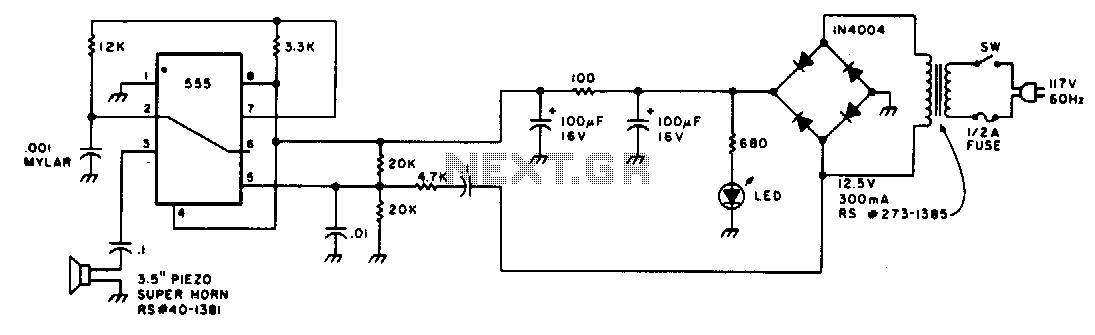
This ultrasonic dog repeller circuit is designed to deter aggressive dogs. It is constructed using the well-known 555 timer circuit, a buzzer, and a small ferrite transformer. The ultrasonic dog repeller circuit operates by emitting high-frequency sound waves that are...
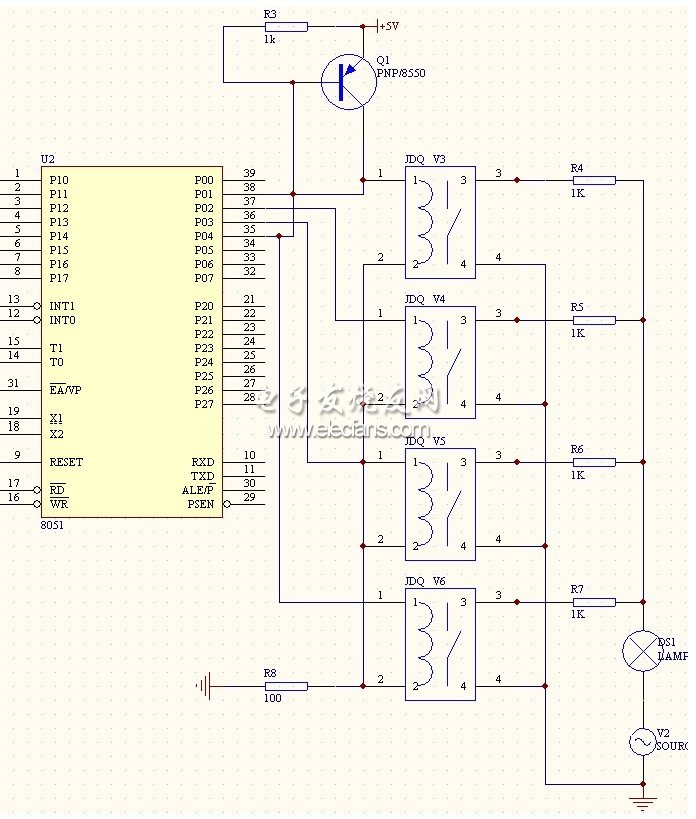
This system is a control system based on a single-chip computer that allows for remote operation of lighting. The scheme primarily addresses the transmission and reception of signals, as well as program manipulation of various signals once they are...
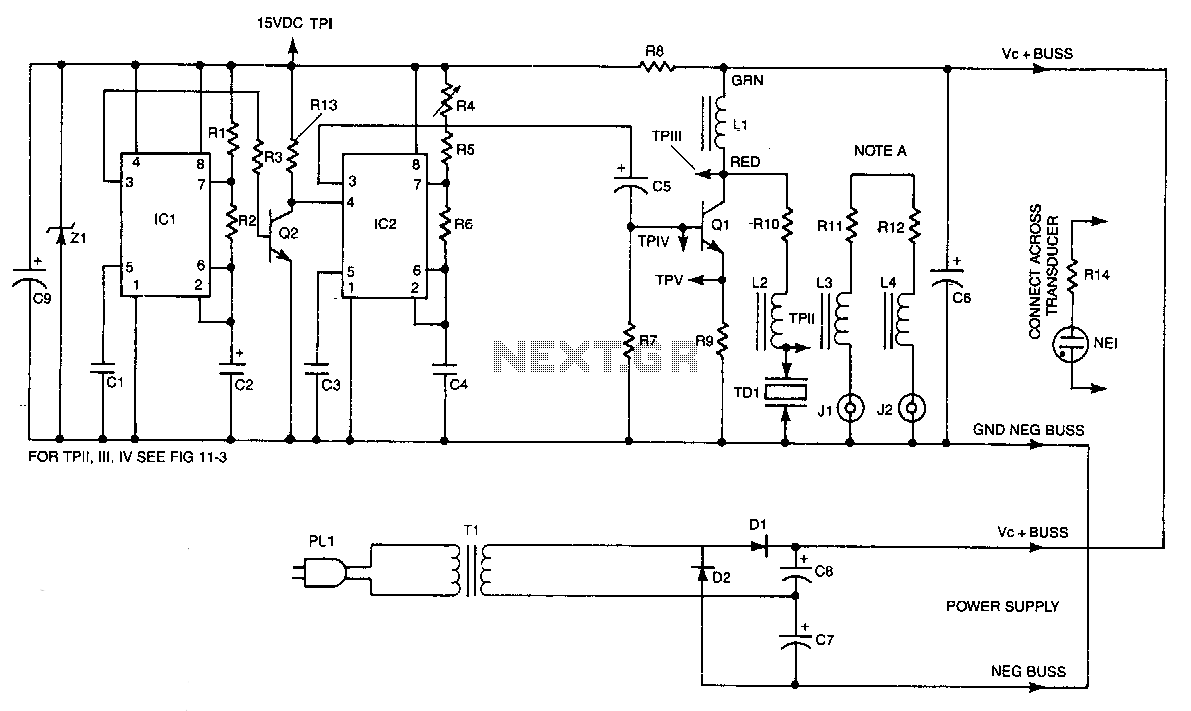
Low-intensity ultrasonic sound waves in the 30-45 kHz frequency band repel insects and small rodents. The unit is designed to generate a swept square wave from 30 to 45 kHz. The LM555 integrated circuit (IC) is configured as an...

The circuit utilizes a 555 timer integrated circuit (IC) configured as an astable multivibrator, which generates a continuous signal at a specific frequency as long as its reset pin (pin 4) is held high. The ultrasonic transducer employed in...