
Dancing Robots

The dancing robot project involves a simple yet effective control mechanism utilizing a parallel port to interface with the motors. The primary components include DC motors, a protoboard, a parallel port connection, and a microcontroller or computer running the Winamp software. The circuit diagram for controlling one motor consists of two outputs from the parallel port that dictate the motor's direction. Each motor is connected to a transistor that acts as a switch, allowing for the control of higher current loads than the parallel port can handle directly.
To create a more refined movement, the use of servo motors is proposed. Servos provide precise control over angular position, making them ideal for applications requiring accurate positioning, such as a dancing robot. The transition from DC motors to servos would involve reconfiguring the circuit to accommodate the control signals required by servos, which typically use a PWM (Pulse Width Modulation) signal for position control.
For the software aspect, the plug-in developed for Winamp analyzes the audio signal in real-time, extracting features such as beat and rhythm to dictate the timing of motor activation. Improvements in the beat detection algorithm could enhance the robot's responsiveness to various musical styles, allowing it to perform more complex dance moves. This would involve signal processing techniques to identify beats and tempo more accurately, ensuring that the robot's movements are synchronized with the music.
Overall, this project combines basic electronic components with software programming to create an engaging and interactive robotic experience that responds dynamically to music, offering opportunities for further enhancements and refinements in both hardware and software.A robot that dances to music. G‚ Wouldn`t it be wicked cool to have a cute little robot on your desk dancing to Fatboy Slim Winamp provides a nice API for writing music visualization plug-ins. G‚ I wrote a plug-in that sends signals to the parallelport that correspond to the waveform data in the song being played.
G‚ By setting the pins of the parallel port on and off, I can control the robot and attempt to make him respond appropriately to changes in the music. My first dancing robot prototype was a metal and rubber incarnation of the Kinetix dancing baby. G‚ I took the baby`s rubber arms off, inserted circular plastic joints, and soldered them onto some 99-cent DC motors from Radio Shack. G‚ The motors were hooked up to a protoboard on which I built a circuit that turned them on and off in response to the signals from the parallel port.
Unfortunately, the baby`s thick arms were a little too heavy for the wimpy motors I was using. G‚ Instead of a dancing baby, all I got was a baby that twitched uncontrollably to the music, as if Winamp were givingG‚ him an epileptic seizure. I decided to try a smaller dancing figure instead, so I outfitted this Buzz Lightyear action figure with the same motors.
G‚ He dances in rhythm very well for songs with strong drumbeats, but not as well for quiet songs. If you want to try building your own dancing robot, I can send you my plug-in. G‚ Here`s a diagram of the circuit I used. G‚ This diagram is for just one motor, but the parallel port has eight data pins, so you can replicate this circuit three more times to control four motors. The motor can be turned forward by setting pin 1 on and pin 2 off, or in reverse by setting 1 off and 2 on.
G‚ Turning both pins off turns off the motor, while turning both pins on blows out your transistors (I did this a lot). I`m going to try to build a better version of the robot that uses servo motors to move the robot`s limbs in a more controlled fashion, but I`m a little concerned that this will make the cost of the robot too high (right now, the entire thing can be built with 5 dollars worth of electronic components).
I also want to tweak the plug-in a bit to perform some more sophisticated beat detection. G‚ Right now Buzz dances quite well to Prodigy, but very poorly to Beethoven. G‚ Ideally, he would dance well to many different types of music. 🔗 External reference
Related Circuits

The LED running light project can be easily implemented using microcontrollers, particularly the Microchip PIC microcontroller. This project utilizes the PIC16F877A microcontroller, which features a 40-pin IC configuration, with LEDs connected to port B. The LEDs twinkle in accordance...
The basic circuit illuminates up to ten LEDs in sequence, following the rhythm of music or speech picked up by a small microphone. The expanded version can drive up to ten strips, formed by up to five LEDs each,...
A project focused on obstacle avoidance and path tracing navigation for industrial robots. A robot is a self-guided machine capable of performing tasks autonomously. Additionally, robots often exhibit characteristics through their design or movements that give the impression of...
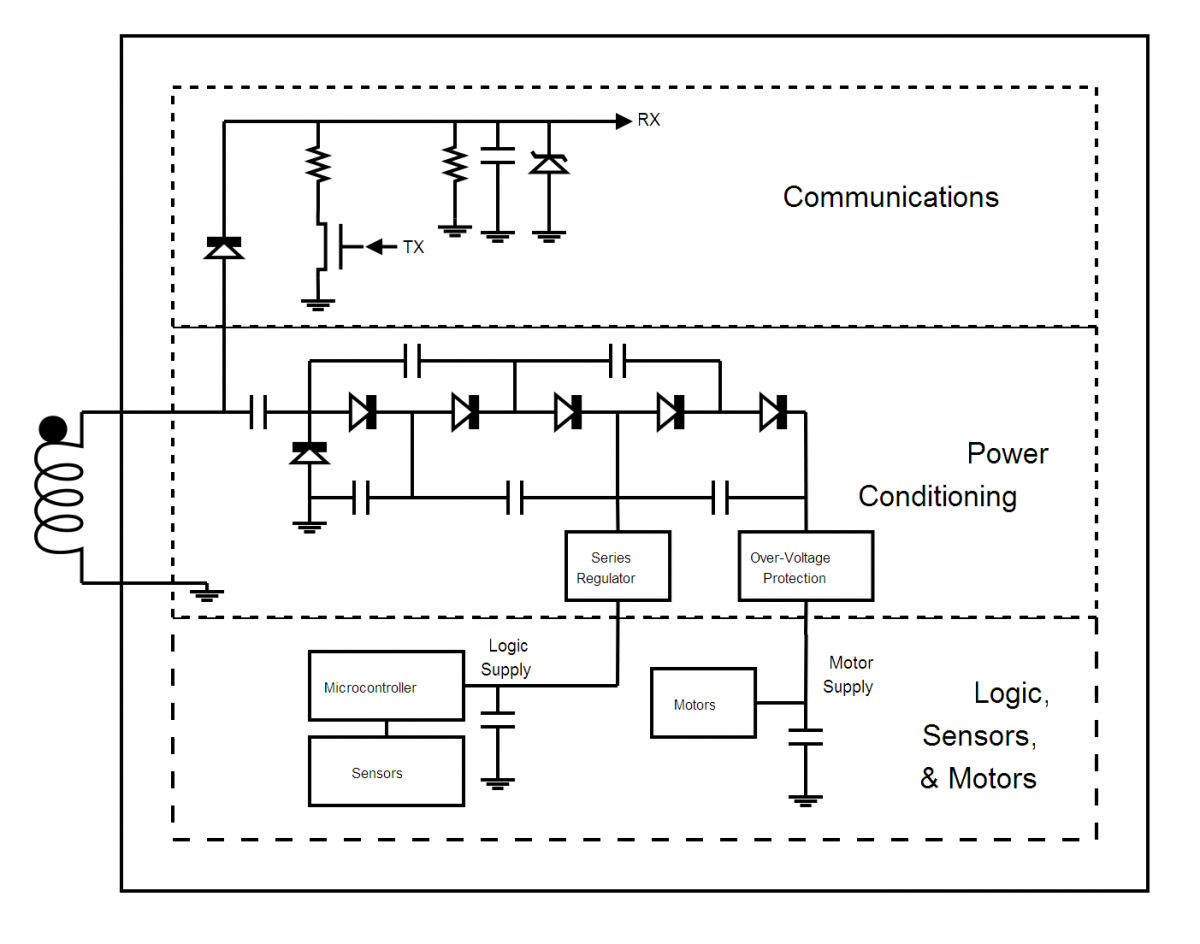
Wireless power transfer is not a new concept; it has been discussed since Tesla's patent in 1900, titled "Apparatus for Transmission of Electrical Energy" (USPTO #649, 621). As the technology evolves, the range of potential applications will expand. For...

This is a simple dancing light circuit that utilizes the NE555 (IC1) and CD4017 (IC2) integrated circuits. IC1 is configured as an astable multivibrator to generate clock pulses for the CD4017. Each clock pulse received at the clock input...
The basic circuit illuminates up to ten LEDs in sequence, synchronized with the rhythm of music or speech detected by a small microphone. The expanded version can drive up to ten strips, each containing up to five LEDs, powered...