
Wirelessly Powering a Swarm of Robots
The wireless power transfer system described utilizes inductive coupling to transmit energy efficiently over short distances. The core component is a resonant transmit coil, which generates an oscillating magnetic field when energized. This magnetic field induces a current in a corresponding receive coil located within the robots. The design of the transmit coil is crucial; it must be tuned to resonate at the operating frequency (e.g., 125 kHz). This resonance enhances the system's efficiency, allowing for the transfer of power with minimal losses.
The surface design is optimized to accommodate multiple robots, ensuring that the magnetic field is strong enough to power all units simultaneously. The use of basic microcontrollers for control and communication allows for the integration of various operational modes, such as energy harvesting and data transmission. Each robot can be equipped with a receive coil and a suitable energy storage device, such as a lithium-ion battery or supercapacitor, to ensure reliable power supply during operation.
The system's efficiency is a critical factor, with approximately 75% efficiency achieved in initial tests. This level of efficiency is essential for practical applications, especially in scenarios where robots operate continuously or in swarms. Future developments may include enhancements to the coil design, optimization of the operating frequency, and advanced control algorithms to manage power distribution among multiple robots effectively.
Overall, the described wireless power transfer system holds significant promise for applications in robotics, enabling more flexible and efficient operation of autonomous systems while reducing the logistical challenges associated with battery management.Wireless power transfer is nothing new; it has been discussed since Tesla`s patent in 1900 entitled "Apparatus for Transmission of Electrical Energy" (USPTO #649, 621). However, as the technology matures, it will be interesting to see what myriad applications arise. For example, Intel`s system is capable of transmitting up to 60 Watts (the demo of lighting an incandescent bulb)
around 75% efficiency. They hope to one day use the system to remotely charge laptops. Meanwhile for robotics, wireless power has the capability to transform research and applications involving swarms of small (mini/micro) robots. When dealing with robot swarms numbering in the hundreds or even just a dozen, tethering is impractical and changing batteries is cumbersome.
By way of an example, consider the battery-powered robot swarm by Caprari from EPFL in Switzerland, where they have ~100 robots operating simultaneously. Hooking up 100 robots for battery charging does not sound like such a fun prospect - more importantly, it is a significant research impediment.
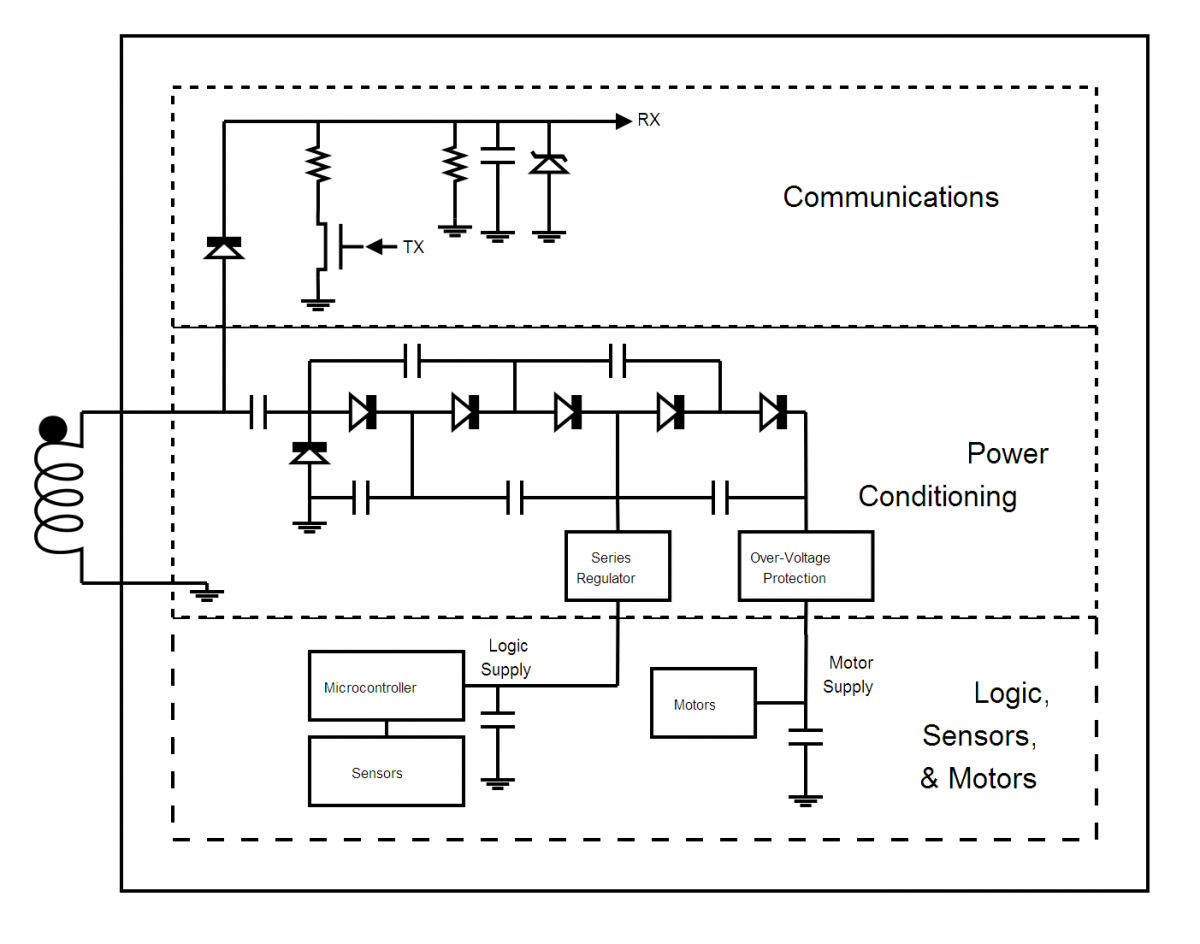
Instead, it is possible to use inductively-coupled wireless power, in a manner similar to Low-Frequency (125kHz) RFID, to power the swarm or just to perform simultaneous, contact-less battery recharging. This is the goal of the work presented by Deyle (myself) and Reynolds in Surface based wireless power transmission and bidirectional communication for autonomous robot swarms.
What`s great about this work is that the fundamental design is straight-forward, and can be prototyped using discrete components and basic microcontrollers, making the technology available to researchers and hobbyists alike. The surface is outfitted with a transmit coil. This coil operates in resonance to increase the circulating current and thus increase the magnetic flux - providing increased power density on the surface.
Now all of the robots can either operate simultaneously on the surface, or they can sit still and recharge on-board energy storage (such as a large capacitor or battery)! Here is what it looks like in operation (along with a wirelessly-powered LED). 🔗 External reference
Related Circuits
The 2009 Robot Rally highlighted the flaws resulting from a rapid three-week engineering and building project. Time-saving shortcuts in both code and hardware led to multiple failures, including edge detectors, beacon trackers, and line follower reversals. Investigations were conducted...
The simplest solution for implementing joystick control for a robot is to program the actions in software on a microcontroller. However, many users prefer off-the-shelf components, thus this circuit is designed using diodes, resistors, transistors, and a FAN8200 motor...
The schematic diagrams for the TPS61042 current LED driver illustrate its capability to power eight LEDs with an efficiency of 81% at 3.6V and 18.6mA. The TPS61042 is commonly utilized in applications such as white LED supply for backlight...
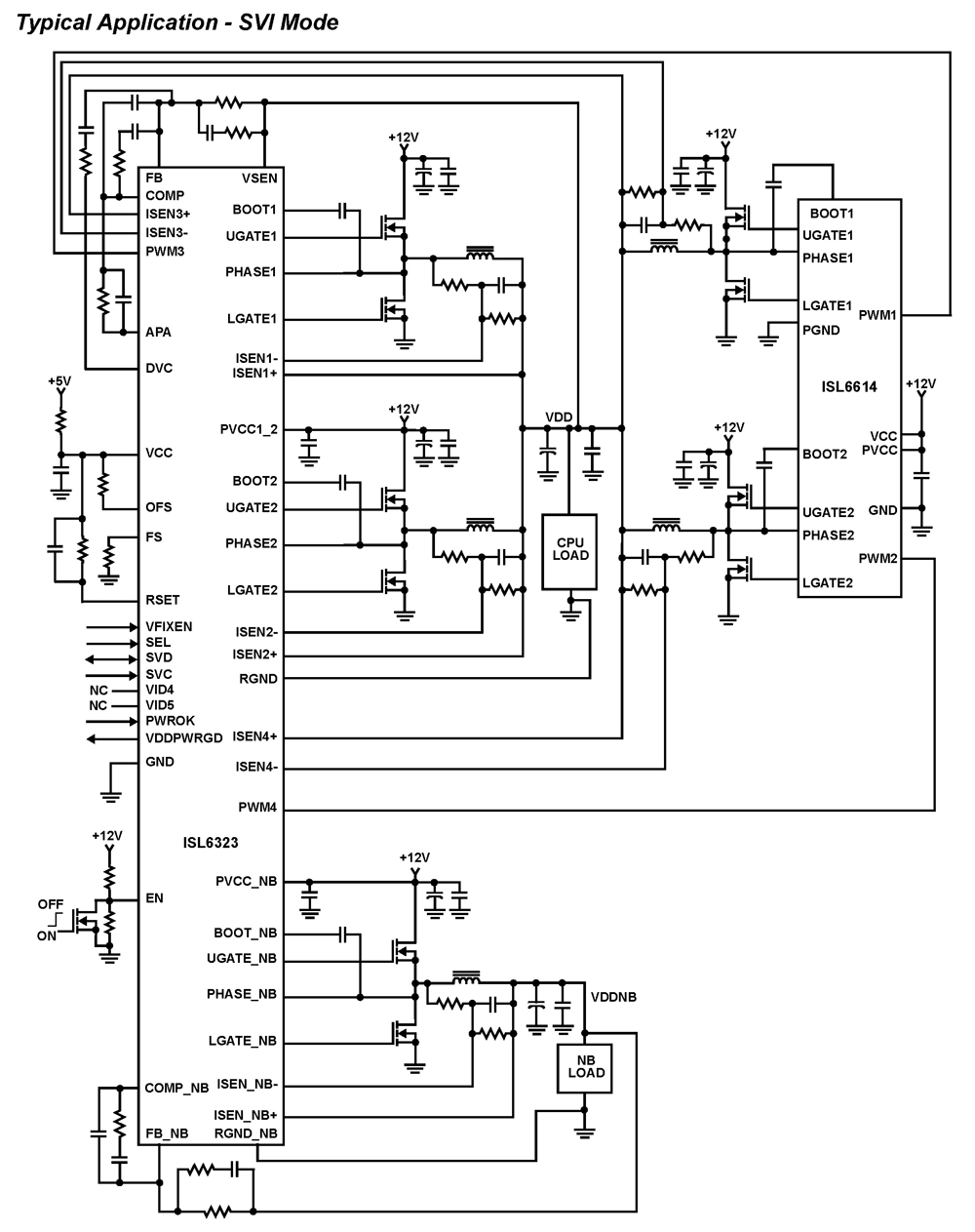
The ISL6323 dual PWM controller provides high efficiency and precise regulation through two synchronous buck DC/DC converters. It supports hybrid power control for AMD processors, operating via either a 6-bit parallel VID interface (PVI) or a serial VID interface...
A project focused on obstacle avoidance and path tracing navigation for industrial robots. A robot is a self-guided machine capable of performing tasks autonomously. Additionally, robots often exhibit characteristics through their design or movements that give the impression of...
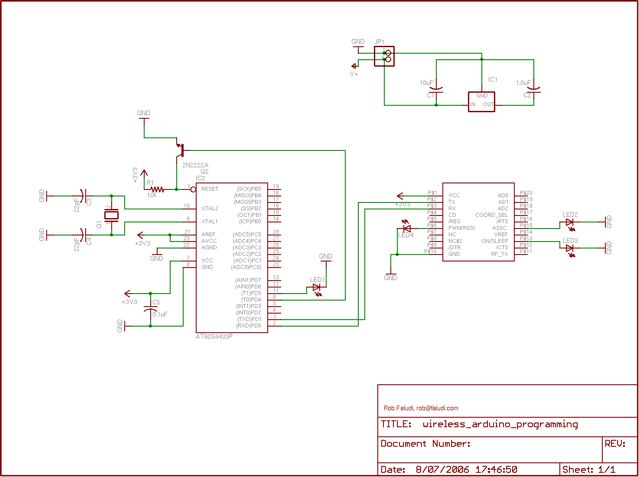
The Arduino system provides a straightforward and open-source approach for programming microcontrollers. Typically, this involves using a serial or USB cable directly connected to the microcontroller project. However, challenges arise when the project is located in inaccessible areas, such...