
Obstacle Avoidance & Navigation for Industrial Robots

The project on obstacle avoidance and navigation for path tracing manipulators in industrial robots involves the integration of various sensors, control algorithms, and actuators to enable the robot to navigate complex environments while avoiding obstacles. The primary components of such a system typically include ultrasonic or infrared sensors for distance measurement, which help the robot detect obstacles in its path.
The control unit processes the sensory data using algorithms that implement techniques such as reactive navigation or global path planning. These algorithms can be based on methods like A* or Dijkstra's algorithm, allowing the robot to determine the most efficient route while dynamically adjusting to unforeseen obstacles.
The actuators, often in the form of motors, are responsible for the movement of the robot. They receive commands from the control unit to change direction or speed based on the navigation algorithms' outputs. The entire system may also incorporate a feedback loop, where the robot continuously monitors its environment and adjusts its path in real-time.
Power management is another critical aspect of this project, as the robot must maintain sufficient energy to perform its tasks throughout its operational period. This can involve the use of rechargeable batteries or energy harvesting techniques to ensure longevity and efficiency.
In summary, the project encompasses the design and implementation of a sophisticated robotic system capable of autonomous navigation and obstacle avoidance, emphasizing the integration of sensor technology, control algorithms, and actuation mechanisms to achieve efficient and intelligent movement in industrial settings.A project on Obstacle Avoidance & Navigation of Path Tracing Manipulator for Industrial Robots. A robot is an automatically guided machine, able to do task on its own. Another common characteristic is that by its appearance or movements, a robot often conveys a sense that it has intent or agency of its own 🔗 External reference
Related Circuits
The APX9132 integrated circuit is an ultra-sensitive, pole-independent Hall-effect switch featuring a latched digital output. It operates within a voltage range of 2.5 volts to 3.5 volts, and its unique clocking scheme reduces average power consumption. The output activates...
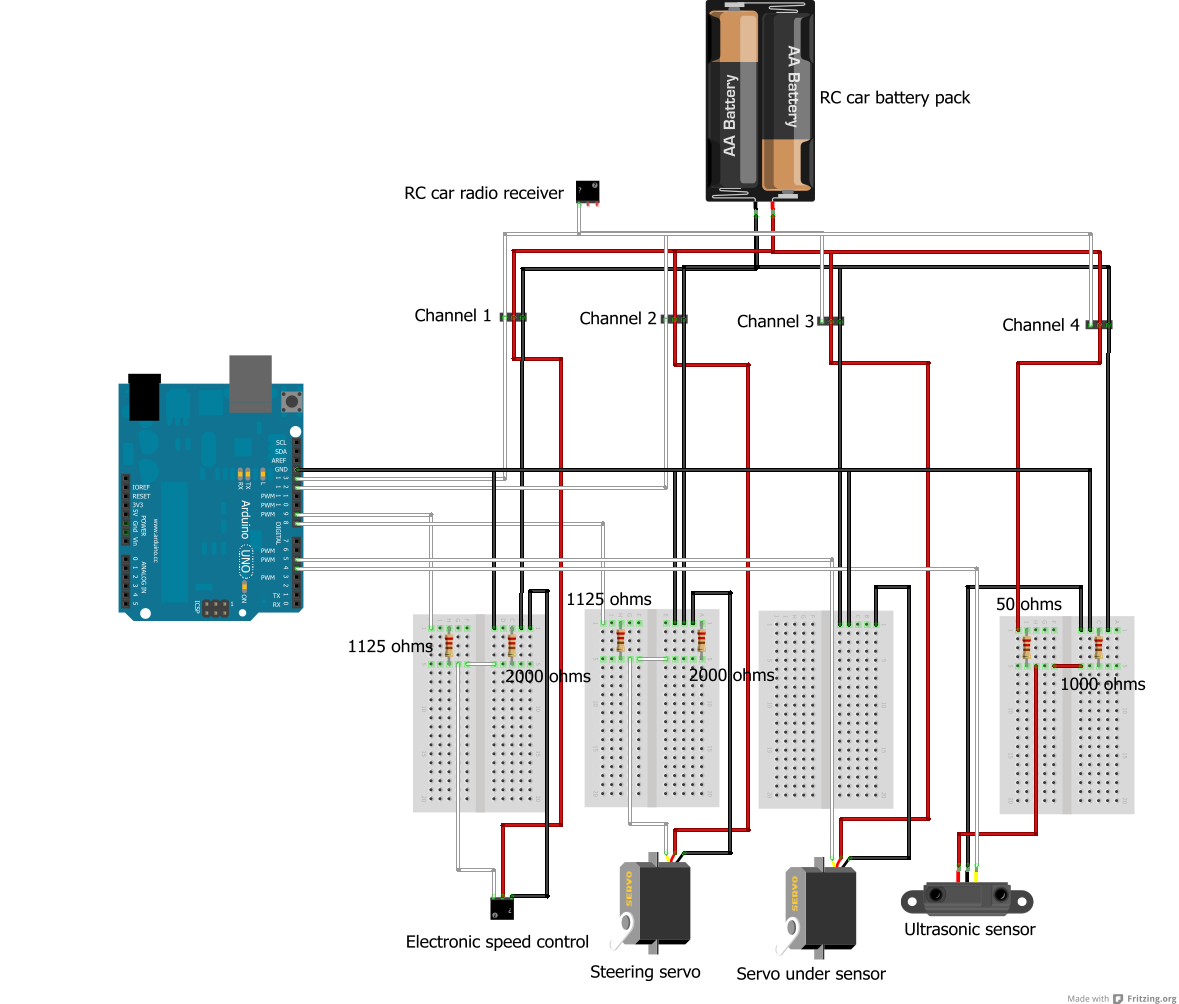
The objective is to enable the car to avoid obstacles using ultrasonic sensor data to determine the nearest obstacle-free heading towards its destination. An ultrasonic sensor mounted on a servo takes distance measurements at various angles and selects the...
A robot that dances to music. It would be fascinating to have a small robot on your desk dancing to music from Fatboy Slim. Winamp provides an API for writing music visualization plug-ins. A plug-in was developed that sends...
These are operational amplifier (op-amp) based filters that are particularly effective within the audio frequency range. The calculators for these filters utilize formulas and tables from the book "Electronic Filter Design Handbook" by Arthur B. Williams. Bandpass filters allow...
The robot requires a method for detecting obstacles (or other robots) without making physical contact. This capability allows the robot to determine whether to avoid or confront and investigate the obstacle based on its programming. This document outlines the...
This is a simple and inexpensive clap-operated switch that utilizes only four transistors along with a resistor-capacitor network. The project name indicates its application, which can be used for level control in hydroponic projects and for kitchen purposes, such...