
implement free running counter in pic16f84a using seven segment display
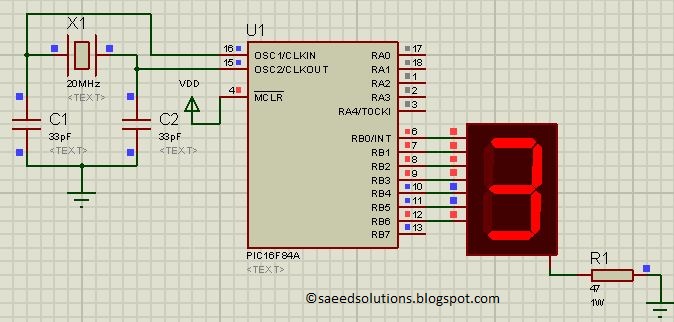
The PIC16F84A microcontroller is a widely used device in various embedded applications, characterized by its 8-bit architecture and a range of integrated peripherals. A free-running counter is a fundamental component in digital systems, often utilized for timing applications, event counting, and frequency measurement.
The implementation of a free-running counter on the PIC16F84A involves configuring the microcontroller's timers and registers appropriately. The primary timer used for this purpose is Timer0, which can be configured to operate in different modes, including 8-bit and 16-bit.
To set up the counter, the following steps are typically involved:
1. **Configuration of the Timer**: The Timer0 register is configured by setting the appropriate bits in the OPTION_REG register. The prescaler can be adjusted to manage the timer's overflow rate, which directly influences the counter's speed.
2. **Initialization**: The counter variable is initialized to zero at the start of the program. This ensures that the counting begins from a known state.
3. **Interrupt Setup**: If an interrupt-driven approach is used, the global and peripheral interrupt enable bits must be set. The Timer0 overflow interrupt can be enabled to trigger an interrupt service routine (ISR) when the timer overflows.
4. **Counter Logic**: Within the main loop or the ISR, the counter variable is incremented each time the Timer0 overflows. This can be done by checking the TMR0 register against its maximum value and resetting it accordingly.
5. **Output Display**: The counter value can be displayed on an output device, such as an LCD or through serial communication. This allows for real-time monitoring of the count.
6. **Looping**: The program typically runs in a continuous loop, allowing the counter to increment indefinitely until the microcontroller is reset or powered down.
This implementation not only demonstrates the functionality of a free-running counter but also provides insights into timer operations and interrupt handling in the PIC16F84A microcontroller, which are critical for developing robust embedded systems.This post provides the implementation of free running counter ( using c language ) for PIC16F84A micro-controller. This code is written in such a way that,.. 🔗 External reference
Related Circuits
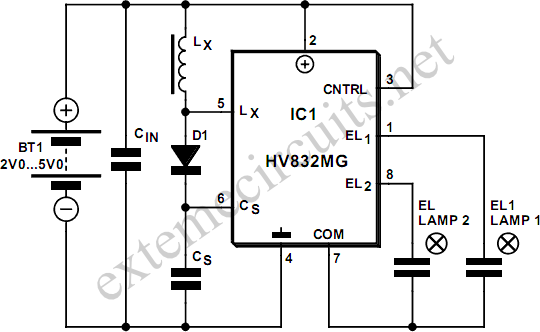
An EL lamp is a solid-state, low-power, uniform area light source. Due to its thin profile (as thin as 0.3 mm) and versatility in size and shape, EL lamps are ideal for providing backlighting for LCD displays, membrane keypads,...
This weblog focuses on electronic circuit schematics, PCB design, DIY kits, and electronic project diagrams. It discusses a 32.768 kHz square wave generated by a common watch crystal. This output can be connected to a 15-stage binary counter to...

A voltage-controlled oscillator using the NE555. This circuit is commonly referred to as a voltage-to-frequency converter because the output frequency is altered by varying the input voltage. As previously noted, pin 5 serves as the voltage control terminal, which...

The term "pentester" refers to a penetration tester, individuals who assess security vulnerabilities. Many high-end hotels globally depend on keycard locks for securing hotel rooms. However, recent incidents of theft have shown that these locks may not be as...
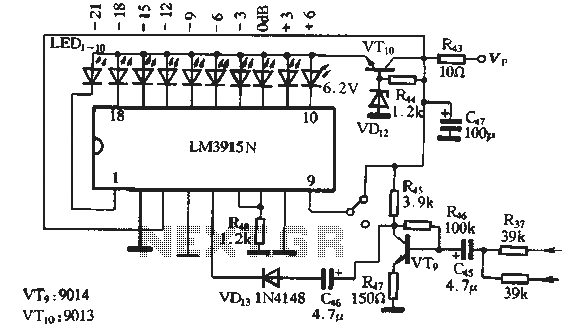
The circuit features a manual recording level control function. When in recording mode, the recording level is indicated by the LM3915N. The sound recording circuit, as illustrated in Figure 3-17, employs an RC network and an associated audio recording...
A meter is a measuring instrument. An ammeter measures current, a voltmeter measures the potential difference (voltage) between two points, and an ohmmeter measures resistance. A multimeter combines these functions, and possibly some additional ones, into a single instrument....