
line follower mobile robot
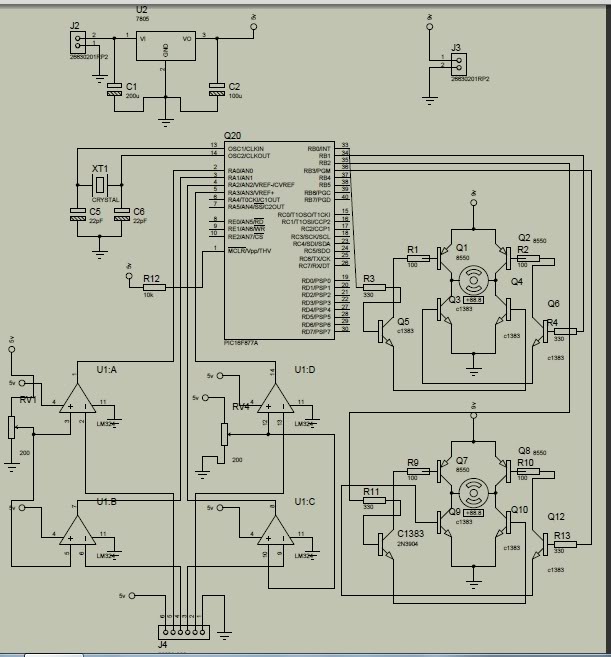
The project centers around the development of a line-following mobile robot, which utilizes a microcontroller as its central processing unit. The robot is designed to detect and follow a line on the ground, which is typically represented by a contrasting color to the surface. The essential components of the robot include the chassis, motors, wheels, sensors, and the microcontroller.
The chassis, repurposed from a remote-controlled vehicle, serves as the foundation for the assembly. It provides the necessary structure to house all other components. The motors, typically DC motors, are attached to the wheels and are responsible for propelling the robot forward and enabling it to turn. The control of these motors is managed by the microcontroller, which processes input from the sensors.
The sensors, often infrared or reflectance sensors, are positioned at the front of the robot. Their function is to detect the line by measuring the amount of reflected light. When the sensors identify the line, they send signals to the microcontroller, which then adjusts the motor speeds accordingly to keep the robot aligned with the line.
Programming the microcontroller involves writing a simple control algorithm that interprets the sensor data and determines the appropriate motor actions. This may include turning left or right, speeding up, or slowing down based on the robot's position relative to the line.
Overall, this project serves as an excellent introduction to robotics and microcontroller programming, offering practical experience in circuit design, soldering, and algorithm development. The challenges faced during assembly and programming will contribute to skill development in electronics and robotics.This is my first Microcontroller Hobby Project. He is ""Cruddy"" my line follower mobile robot. I named him Cruddy because he`s quite a mess on his structure. It is my first time on building a robot so expect that my soldering skills are not yet that good. The chassis was from a remote controlled.. 🔗 External reference
Related Circuits
A robot has been designed and built to vacuum the floor of a room or area autonomously, requiring only the initial activation by a user. This project addresses the demand for an affordable and user-friendly product that can independently...
It is a relatively simple circuit, with which we can have optical and sound clue, when we have telephone ring in the line of telephone. The calls in the line, are changed in pulses of frequency 400 HZ from...
There are two differing opinions regarding the charging of alkaline batteries. Some assert that charging is effective, while others caution against it due to the risk of explosion. It is acknowledged that rechargeable alkaline batteries can typically endure 30...
This Project Line Following Autonomous Robot is based on 8 bit Microcontroller AT89C2051. This Robot follows the black line which is drawn over the white surface or it follows the white line which is drawn over the black surface....
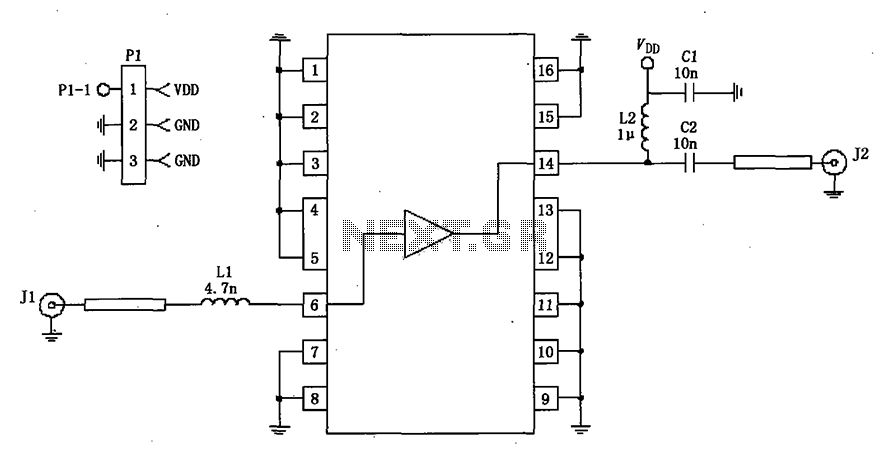
A 50-ohm impedance is illustrated in the RF2320 linear amplifier circuit, which is configured for input and output using transmission lines and inductive or capacitive components to create a matching network. The RF2320 linear amplifier circuit is designed to operate...
When the 36 kHz infrared light emitted by the LEDs is reflected off an object, one of the receiver modules is activated. The PIC16F84 microcontroller then directs the robot to avoid the object by reversing one of the motors. The...