
Make your own instrumented glove
To obtain the PowerGlove sensors, incisions were made in the glove's grey soft plastic material between the middle and ring fingers, as well as between the index finger and thumb. The sensors can be removed with considerable force, although caution is advised to avoid sharp bends, as the sensors are housed in a transparent plastic sheath. Following extraction, the sensors must be desoldered. The PowerGlove sensors are designed to be sensitive to flex in a single direction.
The operating principle of these sensors is straightforward: one side of the sensor's substrate is coated with a high-resistance ink that increases resistance when stretched. Low-resistance ink patches are applied in such a way that only small transverse strips of the high-resistance ink contribute to the stretching effect. Bending the sensor causes one side to stretch slightly while the other side compresses. However, the ink is significantly more sensitive to stretching than to compression, resulting in a unidirectional response. This non-linear behavior is prominent within the first 15 degrees of the sensitive direction, after which resistance changes linearly with the angle, ranging from approximately 100 kOhm to 500 kOhm.
To mitigate non-linearity, it is advisable to apply pre-loading to the sensor, allowing it to flex even when the joint is straight. The angular range of a sensor is sufficient for unidirectional angle measurements of nearly any human joint. For bidirectional joint movements, it is necessary to connect two PowerGlove sensors back-to-back. Calibration is not performed on the sensors, meaning each one has a unique angle versus resistance relationship.
It is important to recognize the limitations of using a flex sensor to measure joint angles through mechanical transfer. For example, accurately measuring the movements of the thumb's carpo-metacarpal joint, which has multiple degrees of freedom, is challenging due to skin motion and tendon presence. Similarly, the metacarpo-phalangeal joints of the index, middle, and ring fingers are not well-suited for this technique due to the movement of tendons beneath the skin. Abduction and adduction of fingers may be feasible by positioning a sensor on its side to achieve nearly 180-degree bends, as demonstrated in the Virtex Cyberglove developed by Jim Kramer at Stanford.
For finger joints, shorter sensor lengths are required, which can be accomplished by cutting the sensor into two or three segments and attaching new leads. However, this modification will impact the sensor's resistance range. Establishing proper galvanic contact with the sensor's low-resistance conductive ink presents a significant challenge.A real cheap glove interface, that still achieves considerable accuracy while improving the comfortability. Essentially, I purchased a bunch of PowerGloves (PG`s), took out the flex sensors, inserted them in sheaths on a lycra glove and suit, hooked them up with a multi-channel serial A/D converter and had a host computer sequentially query the serial interface for the value of each sensor in real-time.
These values then were used to control various electronic musical devices. To obtain the PG sensors, make an incision (it almost feels like surgery) inbetween the middle- and the ringfinger and inbetween the index and the thumb, in the glove`s grey soft plastic material. The sensors can be pulled out, sometimes with quite some force (don`t worry, they are quite robust, but don`t fold them over sharply), because the sensors are secured in a transparent plastic sheath.
Then they have to be desoldered. The PG sensors are sensitive to flex in one direction only. The principle behind the sensors is fairly simple: one side of the substrate of the sensor is coated with a high resistance ink that increases resistance when stretched. Over this ink patches of low resistance ink are deposited, such that only small transversal strips of the high resistance ink contribute to the stretch effect.
The stretch is effected by bending the sensor; one side of the sensor will stretch (a little bit) whilst the other side will compress (a little bit). Unfortunately the ink is far more sensitive to stretch than to compression, hence the unidirectionality.
This non-linear behaviour extends into ca. the first 15 degrees of the sensitive direction. Beyond that the resistance changes linearly with the angle and ranges from ca. 100 kOhm to 500 kOhm. In order to avoid this non-linearity it is advisable to employ some sort of pre-loading of the sensor, i. e. to have the sensor flexed, although the joint is actually straight. The angular range of a sensor is more than enough for unidirectional angle measurement of almost any human joint.
For bidirectional joint movements it is necessary to join two PG sensors back to back. The sensor is by no means calibrated, so that each sensor has its own angle vs. resistance relationship. It is important to note that the technique of a flex sensor that measures the jointangle by simple mechanical transfer of the joint angle is quite limited. For instance, it is quite difficult to measure the movements of the thumb`s carpo-metacarpal joint, with its many degrees of freedom, accurately with a flex sensor, due to skinmotions and the presence of tendons.
The metacarpo-phalangeal joints of the index, middle- and ringfinger do not lend themselves very well for this technique either, due to tendons that move under the skin and skinmotions. Ab- and adduction of fingers may be possible by putting a sensor on its side so that it is bent almost 180 degrees - this is the way it is done in the Virtex Cyberglove from Jim Kramer at Stanford.
For finger joints it is necessary to have shorter sensor lengths. This can fairly easily be done by cutting the sensor in 2 or 3 parts and attaching new leads. This of course will affect the resistance range of the sensor. Making proper galvanic contact with the sensor`s low resistance conductive ink is not a trivial problem however. My first try 🔗 External reference
Related Circuits
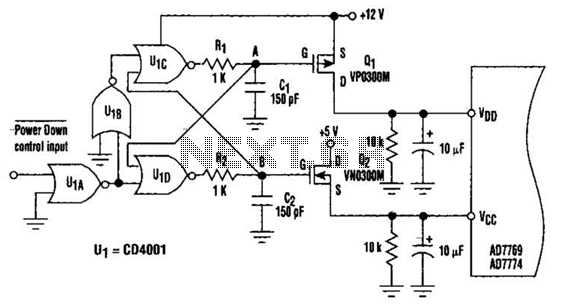
This circuit adds a power-down function to analog I/O ports, such as the AD7769 and AD7774. Additionally, the diodes typically required to protect the devices against power-supply mis-sequencing can be eliminated. In this design, MOSFETs Q1 and Q2 switch...

The discrete-gate up/down-counter design has the unusual property of freezing, or saturating, when it reaches its lowest count in the down-count mode or its highest count in the count-up mode instead of rolling over and resetting as do most...
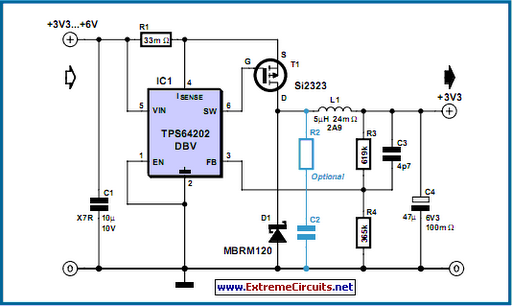
The TPS6420x controller is designed to operate from one to three series-connected cells or from a 3.3 V or 5 V supply obtained from a USB port. At its output, it can produce 3.3 V at 2 A, suitable...
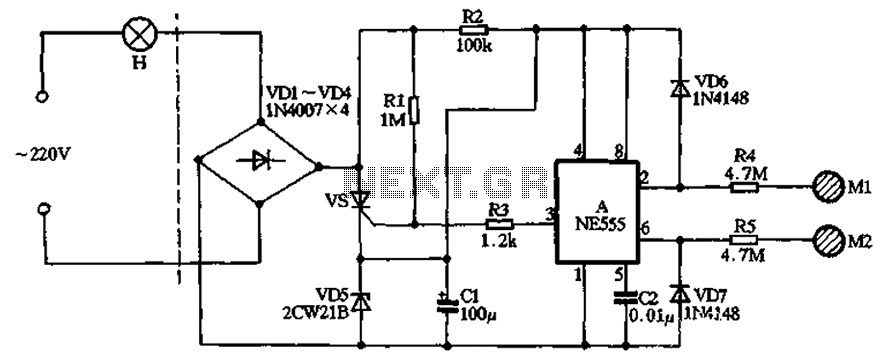
The circuit illustrated in the figure features a dashed line on the left, representing a standard lighting circuit, while the right side is responsible for the dual functionality of touch activation using the NE555 timer. Components VD1 through VD4...
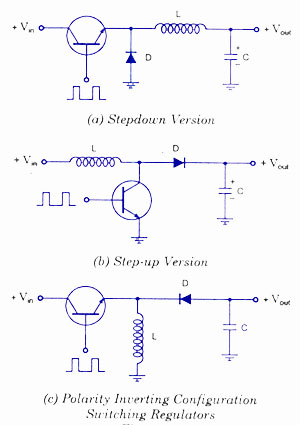
Switching voltage regulators include step-up, step-down, and polarity-inverting configurations, along with their working principles and circuit diagrams. Switching voltage regulators are essential components in modern electronic circuits, providing efficient voltage conversion. These regulators can be categorized into three main types:...
This simple circuit allows the use of an oscilloscope as a Time Domain Reflectometer (TDR). The operation involves sending a pulse down a cable and observing the resulting reflections. The circuit design for utilizing an oscilloscope as a Time Domain...