
Modelica Magnetic FluxTubes Solenoid Actuator
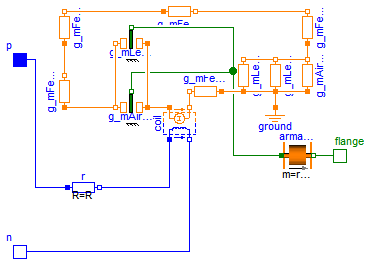
The SimpleSolenoid model represents a lifting magnet system designed to operate efficiently with a planar armature. The electrical characteristics are defined by a coil with a resistance of 10 ohms and 957 turns, which influences the magnetic field generated when current flows through it. The yoke is a critical component, designed with specific dimensions to optimize magnetic flux. The outer and inner radii of the yoke are set at 15 mm and 13.5 mm, respectively, with a total axial length of 35 mm, ensuring that the magnetic circuit is effective.
The armature, with a radius of 5 mm and a length of 26 mm, serves as the moving part of the actuator, which is influenced by the magnetic field generated by the coil. The mechanical characteristics of the system are enhanced by a spring with a stiffness of 1e11 N/m, providing a return force to the armature when de-energized. Additionally, a damping coefficient of 400 is included to mitigate oscillations and stabilize the armature's motion during operation.
The model incorporates various permeance components, which are critical for calculating the magnetic circuit's effectiveness. This includes the permeance of the hollow cylindrical sections of the ferromagnetic yoke and armature, as well as the permeance of the working air gap between the armature and pole end faces. The model also considers the effects of parasitic air gaps due to slide guiding, which can affect the efficiency of the magnetic circuit.
Overall, the SimpleSolenoid model is a comprehensive representation of a lifting magnet system, integrating both electrical and mechanical parameters to provide insights into its performance characteristics. The careful selection of materials, dimensions, and configurations allows for a detailed understanding of the magnetic interactions and mechanical dynamics involved in the operation of the solenoid.Model SimpleSolenoid "Simple network model of a lifting magnet with planar armature end face" parameter SI. Resistance R = 10 "Armature coil resistance"; parameter Real N = 957 "Number of turns"; //yoke parameter SI.
Radius r_yokeOut = 15e-3 "Outer yoke radius"; parameter SI. Radius r_yokeIn = 13. 5e-3 "Inner yoke radius"; parameter SI. Length l_yoke = 35e-3 "Axial yoke length"; parameter SI. Length t_yokeBot = 3. 5e-3 "Axial thickness of yoke bottom"; //pole parameter SI. Length l_pole = 6. 5e-3 "Axial length of pole"; parameter SI. Length t_poleBot = 3. 5e-3 "Axial thickness of bottom at pole side"; parameter SI. Length t_airPar = 0. 65e-3 "Radial thickness of parasitic air gap due to slide guiding"; parameter Modelica. Magnetic. FluxTubes. Material. SoftMagnetic. BaseData material= Modelica. Magnetic. FluxTubes. Material. SoftMagnetic. Steel. Steel_9SMnPb28() "Ferromagnetic material characteristics"; //armature parameter SI. Radius r_arm = 5e-3 "Armature radius = pole radius"; parameter SI. Length l_arm = 26e-3 "Armature length"; parameter Modelica. SIunits. TranslationalSpringConstant c= 1e11 "Spring stiffness between impact partners"; parameter Modelica. SIunits. TranslationalDampingConstant d= 400 "Damping coefficient between impact partners"; parameter SI. Position x_min = 0. 25e-3 "Stopper at minimum armature position"; parameter SI. Position x_max = 5e-3 "Stopper at maximum armature position"; SI. Position x(start=x_max, stateSelect=StateSelect. prefer) "Armature position, alias for flange position (identical with length of working air gap)"; protected parameter SI. Density rho_steel = 7853 "Density for calculation of armature mass from geometry"; public Modelica. Magnetic. FluxTubes. Basic. Ground ground; Modelica. Magnetic. FluxTubes. Basic. ElectroMagneticConverter coil( final N=N, i(fixed=true) "Electro-magnetic converter"; Modelica. Electrical. Analog. Basic. Resistor r(final R=R) "Coil resistance"; Modelica. Magnetic. FluxTubes. Shapes. FixedShape. HollowCylinderAxialFlux g_mFeYokeSide( final nonLinearPermeability=true, final material=material, final l=l_yoke - (t_poleBot + t_yokeBot)/2, final r_i=r_yokeIn, final r_o=r_yokeOut) "Permeance of of hollow cylindric section of ferromagnetic yoke"; Modelica.
Magnetic. FluxTubes. Shapes. FixedShape. HollowCylinderAxialFlux g_mFeArm( final nonLinearPermeability=true, final material=material, final l=l_yoke - (t_yokeBot + t_poleBot)/2 - l_pole - (x_max + x_min)/2, final r_i=0, final r_o=r_arm) "Permeance of ferfomagnetic armature"; Modelica. Magnetic. FluxTubes. Shapes. Force. HollowCylinderAxialFlux g_mAirWork( final mu_r=1, final dlBydx=1, final r_i=0, final r_o=r_arm, final useSupport=false, final l=flange.
s) "Permeance of working air gap (between armature and pole end faces)"; Modelica. Magnetic. FluxTubes. Shapes. FixedShape. HollowCylinderRadialFlux g_mFeYokeBot( final nonLinearPermeability=true, final material=material, final l=t_yokeBot, final r_i=r_arm + t_airPar, final r_o=r_yokeIn) "Permeance of bottom side of ferromagnetic yoke"; Modelica. Magnetic. FluxTubes. Shapes. FixedShape. HollowCylinderRadialFlux g_mAirPar( final nonLinearPermeability=false, final mu_rConst=1, final l=t_yokeBot, final r_i=r_arm, final r_o=r_arm + t_airPar) "Permeance of parasitic radial air gap due to slide guiding"; Modelica.
Magnetic. FluxTubes. Shapes. FixedShape. HollowCylinderRadialFlux g_mFePoleBot( final l=t_poleBot, final r_i=r_arm, final r_o=r_yokeIn, final nonLinearPermeability=true, final material=material) "Permeance of bottom side of pole"; Modelica. Magnetic. FluxTubes. Shapes. FixedShape. HollowCylinderAxialFlux g_mFePole( final nonLinearPermeability=true, final material=material, final l=l_pole, final r_i=0, final r_o=r_arm) "Permeance of ferromagnetic pole"; Modelica.
Magnetic. FluxTubes. Examples. Utilities. TranslatoryArmatureAndStopper armature( final m=rho_steel*l_arm*pi*r_armUPDATE esc311_listings S 🔗 External reference
Related Circuits
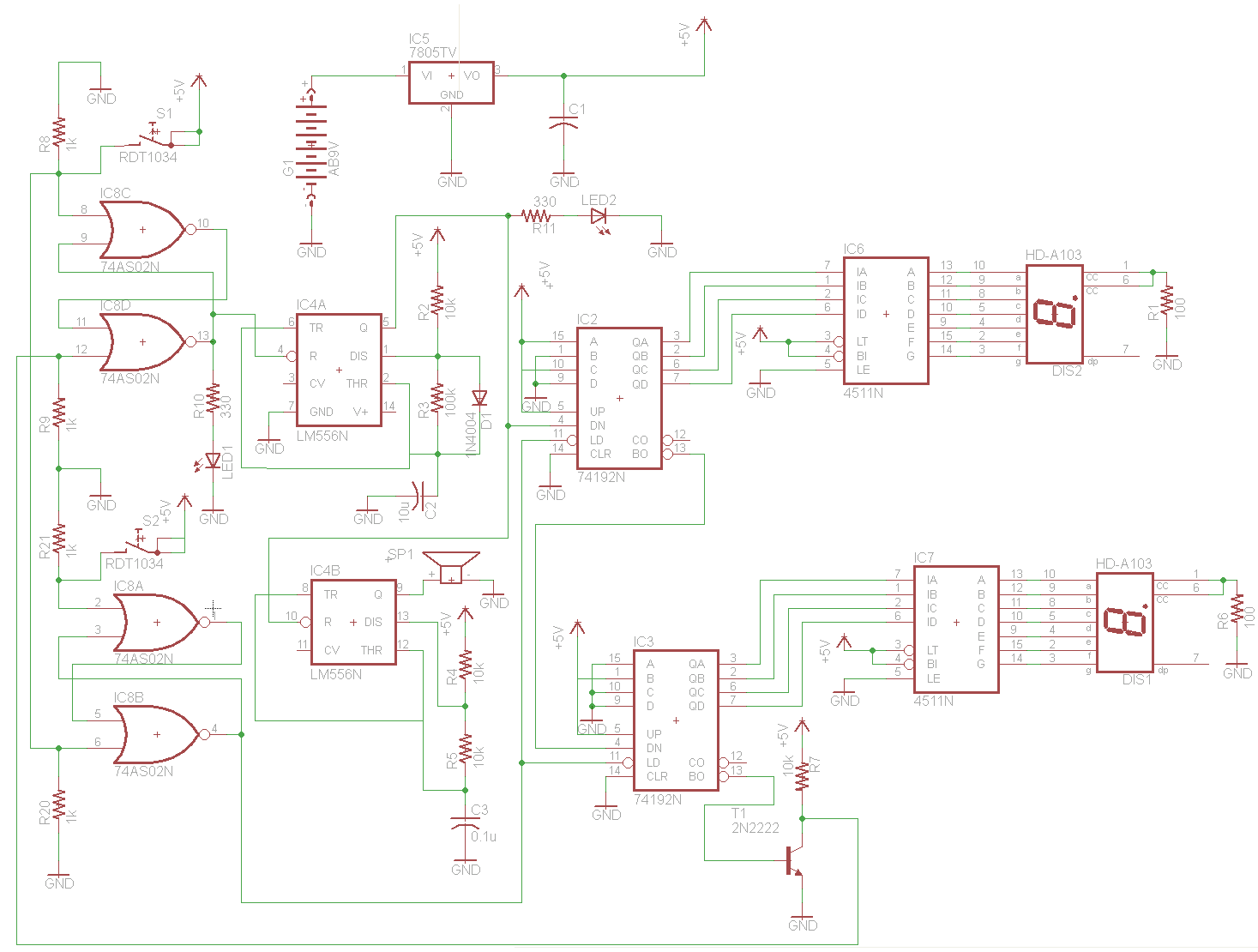
These units can be useful as a short-range, single-channel remote-control. When the pushbutton in the transmitter circuit is briefly activated, the LED D1 in the receiver illuminates and an optional beeper or relay can be operated. Circuit operation is...
Agy utilized the Lilypad Arduino and LEDs for the first time in a textile project called Blinky Bike Bag, merging her skills in fabric manipulation with electronics. The bike bag is constructed from umbrella material to ensure waterproofing and...

This circuit is sensitive to low-frequency electromagnetic radiation and can detect hidden wiring or the field surrounding a transformer. A radial type inductor is used as a probe, which effectively responds to low-frequency changing magnetic and electric fields. Ordinary...
This detector circuit is sensitive to low-frequency electromagnetic radiation and can detect hidden wiring or the field around a transformer. The pickup is achieved using a radial type inductor, which serves as a probe that responds effectively to low-frequency...
This tester is designed to locate stray electromagnetic (EM) fields. It can easily detect both audio and RF signals up to frequencies of approximately 100 kHz. However, it should be noted that this circuit is not a metal detector,...
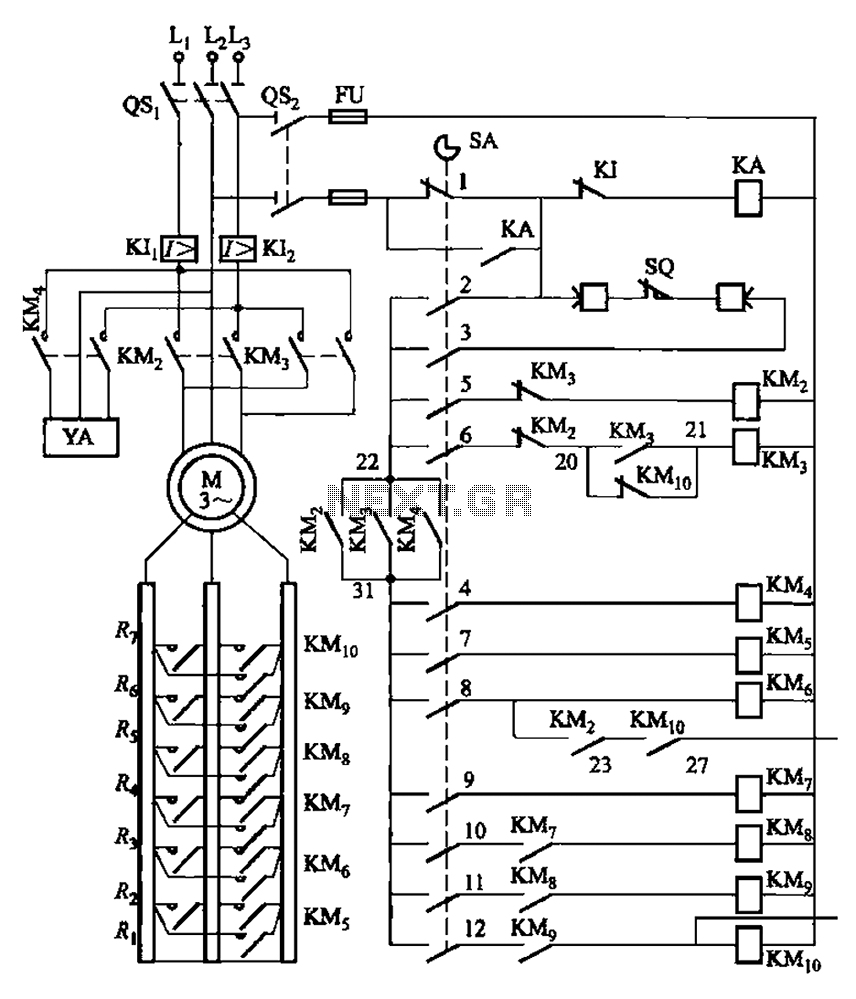
The system is managed by the master controller LKl-12/90 and a magnetic disk control unit PQR10A, which includes a control circuit. The cam control device SA is responsible for contact closure, as indicated in Table 8-5. The main electrical...