
Open Loop Speed Control of a DC Motor via 8255 Controller
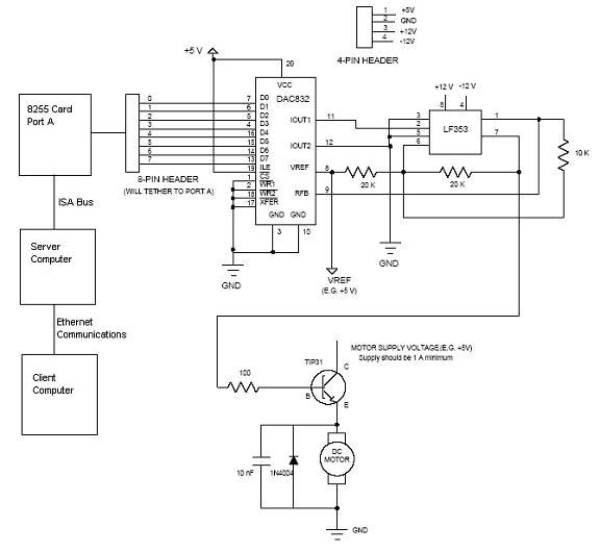
The schematic for this open loop speed control system integrates several key components that work together to achieve precise motor control. The 8255 Digital I/O Controller facilitates communication between the server and the motor control circuitry. It features multiple ports that allow for parallel data transfer, enabling real-time adjustments to motor speed based on user input from the client PC. The DAC0832 digital-to-analog converter translates digital commands from the 8255 into an analog voltage signal, which directly influences the base voltage of the TIP31 power amplifier.
The TIP31 functions as a current amplifier, controlling the motor’s power supply based on the voltage received. The operational amplifier (DAC-LF353) is crucial in maintaining stable voltage levels, ensuring that fluctuations do not affect motor performance. The power amplifier circuit is designed to handle the current requirements of the motor while providing a linear response to the input voltage.
For monitoring, a 100 Ohm resistor serves as a current sensing element, allowing for the measurement of motor current. This feedback loop is essential for maintaining the desired speed and for implementing safety features such as overload protection.
In terms of network architecture, the system leverages TCP/IP protocols to facilitate communication between the server and client PCs. The Winsock component in Visual Basic is instrumental in establishing this connection, allowing for seamless data transmission and control commands. This setup can be expanded with multiple clients, enhancing the system's scalability and flexibility in various industrial applications.
Overall, this circuit design exemplifies a robust approach to DC motor control, combining digital interfacing, analog signal processing, and networked communication to achieve efficient and effective motor management in a variety of operational settings.Open Loop Speed Control of a DC Motor via 8255 Digital I/O Controller chip using TCP/IP Server-Client Application Programmed in Visual Basic. The 8bit DAC0832 chip is used as the Digital to Analog Converter. In this project open loop control of a DC motor will be established using a power amplifier, a digital to analog converter, 8255 digital interface card, a client PC and a Server PC.
The DAC circuit, which is controlled by the server computer via 8255 digital interface, will be used to control the speed of a DC motor by changing the voltage going to the base of the power amplifier. The voltage going into the motor from the power supply is between 0 and +5V. The role of the power amplifier circuit is to provide the current necessary, to operate the motor. The client computer, communicates with the server computer via Ethernet communications and it is the GUI interface to control the speed of the motor.
There can be several client computers hooked up to the server, however, for this application there is only one. The winsock component is used in the Visual Basic code to provide the server/client operations. This internet appliance calls for several electro-mechanical components: An 8255 card to interface the server PC with the dc motor control circuits.
The 8255 card`s purpose is to provide an interface between the server PC and the dc motor control circuits. More information on the 8255 card`s construction and operation may be found at. The DAC-LF353 op amp circuit provides the proper voltage to the TIP31, which regulates the current coming from the power supply.
The circuit is built so that it would output voltage ranging between 5V to +5V. The TIP31 circuit is a power amplifier, which allows current to flow from Collector through the Emitter pin proportional to the voltage on the Base pin. The illustration of the motor is given in Figure-2. The velocity command (RPM) is passed between from the client to the server using WinSock TCP/IP. The velocity command is then converted into a digital number and output to the DAC via Port A of the 8255 digital interface.
5. 5. Motor Current: Motor Current is monitored across the terminals of the motor used as a tachometer using a 100 Ohm resistor wired in series. Expensive and rare pieces of equipment may be brought closer to users all over the world. This allows those who cannot justify purchasing equipment to use it after an agreement is made with a host organization.
Organizations considering purchase of expensive equipment may be able to diffuse the cost of the equipment through renting time on the machine over the Internet. The customer base for this use is of course worldwide. In the considerably large facility, such as a power plant, there will be applications, which require controlling and monitoring on a constant basis.
In these plants there maybe networks, which is, consist of several server and client computers. One of the good examples of the using the server client architecture in a controls/monitoring environment is vibration-monitoring systems used in industrial plants. These consist of accelerometers attached to the critical components to determine the faults before they occur.
There are several data acquisition modules and server PCs acquiring data on a constant basis and taking the FFT and doing a trend analysis. The client computer retrieves this data and makes decisions like issuing alarms or shutting down the related part of the plant.
🔗 External reference
Related Circuits
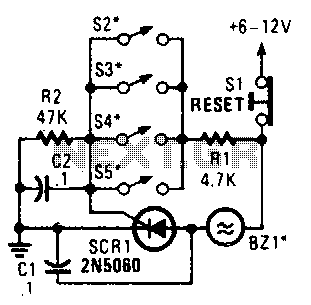
Four parallel switches are employed to monitor four positions. When any switch is closed, SCR1 is triggered, activating the alarm. The alarm is designed to be of the non-interrupting type. The circuit consists of four parallel switches, each representing a...
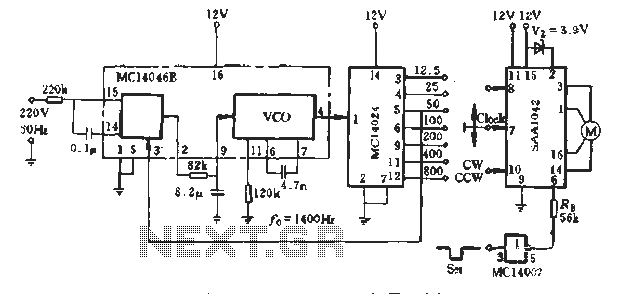
A typical application example is presented, demonstrating the SAA1042 12V stepper motor drive configuration. The phase winding current is set at 200mA. According to RB Figure 5-10, a resistor value of RE = 56kΩ is selected. This resistor is...
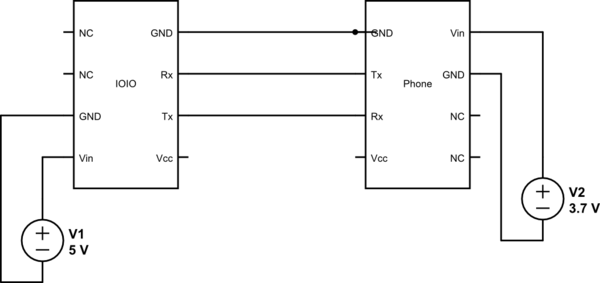
This project utilizes Sparkfun's IOIO for Android, focusing on power consumption concerns. The IOIO board can provide the phone with 500 mA charging, which may be excessive for continuous operation. The proposed solution is to power both the phone...

This circuit is primarily designed as a timely reminder system for monitoring individuals on duty who may fall asleep. It features a detection circuit that processes minute signals. As the LED digital electronic timing clock displays the minute, the...
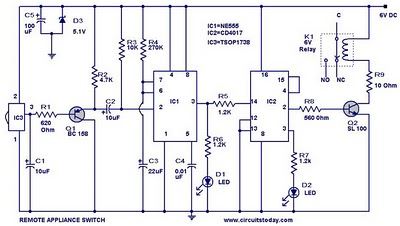
555 Timer TV Remote Controlled Home Appliance Circuit Diagram. Features: 555 timer IC to avoid fast switching. You can only switch the circuit. The 555 timer integrated circuit (IC) is a versatile component widely used in various electronic applications, including...
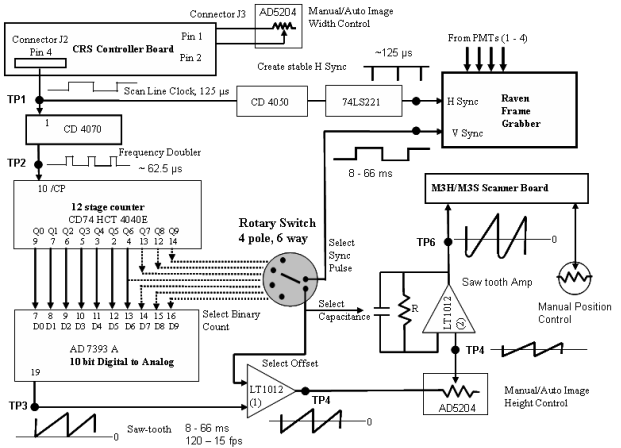
Before building the control circuit, it is essential to understand the function of each component. The schematic below illustrates only the basic functions. The CRS Controller board generates the key synchronization signal, known as the Scan Line Clock (SLC),...