
PC Based Robot with AT89C2051
The described robot control system integrates a personal computer (PC) with a microcontroller, forming a robust architecture for managing sophisticated robotic applications. The PC serves as the primary processing unit, capable of executing complex algorithms and handling high-level tasks such as user interface management, data analysis, and real-time decision-making. The microcontroller, on the other hand, is responsible for interfacing with the robot's hardware components, including sensors, actuators, and communication modules.
The connection between the PC and the microcontroller can be established through various communication protocols such as USB, UART, or I2C, allowing for efficient data transfer and command execution. The microcontroller continuously collects data from the PC, which may include control commands, operational parameters, and feedback from the robot's sensors. This data is processed in real-time to ensure precise control of the robot's movements and functions.
Advanced control algorithms implemented within the microcontroller may include PID (Proportional-Integral-Derivative) controllers for maintaining specific performance metrics, as well as more sophisticated techniques like adaptive control or fuzzy logic to enhance the robot's responsiveness to dynamic environments. The system's design focuses on modularity and scalability, enabling the integration of additional sensors or actuators as required by specific applications.
In summary, this economical robot control system leverages the strengths of both a PC and a microcontroller to create a versatile platform capable of handling a wide range of robotic tasks. The combination of high-speed processing, advanced algorithms, and flexible hardware interfacing positions this system as a valuable solution in the field of robotics.The advent of new high-speed technology and the growing computer capacity provided realistic opportunity for new robot controls and realization of new methods of control theory. This technical improvement together with the need for high performance robots created faster, more accurate and more intelligent robots using new robots control devices, new drives and advanced control algorithms.
This project describes a new economical solution of robot control systems. The presented robot control system can be used for different sophisticated robot applications. The control system consists of a PC, a microcontroller that collects data from the PC 🔗 External reference
Related Circuits
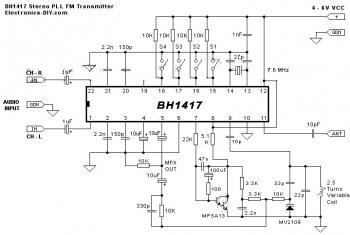
The circuit diagram of a stereo PLL FM transmitter based on the BH1417 chip is presented. This recent design from RHOM integrates numerous capabilities within a compact package. It features pre-emphasis and a limiter to maintain consistent audio levels...
This weblog discusses electronic circuit schematics, PCB design, DIY kits, and electronic project diagrams. The subject circuit is a quality preamplifier with a built-in USB DAC designed for the Leachamp power amplifier. The schematic is based on the PCM2902...
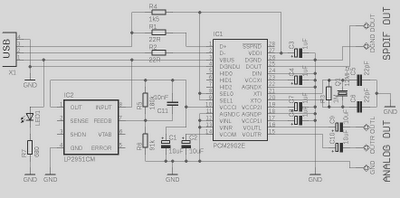
This is a high-quality preamplifier circuit with a built-in USB DAC designed for the Leachamp power amplifier. The schematic is derived from the PCM2902 datasheet. The circuit includes a DAC and ADC, SPDIF output and input, and an HID...
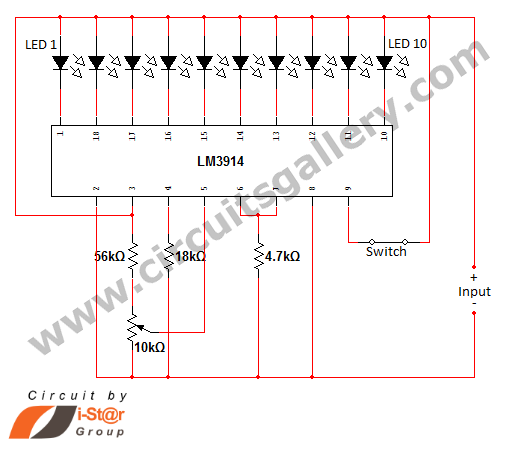
In various situations, it is necessary to indicate the amount of battery charge using methods such as LED dot displays or LED bar displays. This circuit utilizes the LM3914 integrated circuit to serve as a battery charge indicator with...
Microcontroller-based water tank filler circuit diagram. Differences between microprocessors and microcontrollers, parallel port interfacing projects using microcontrollers, applications of microcontrollers in real life, circuit diagram of AVR microcontroller trainer, 8086 microcontroller, microcontroller-based drip irrigation system circuit, design of pulse...
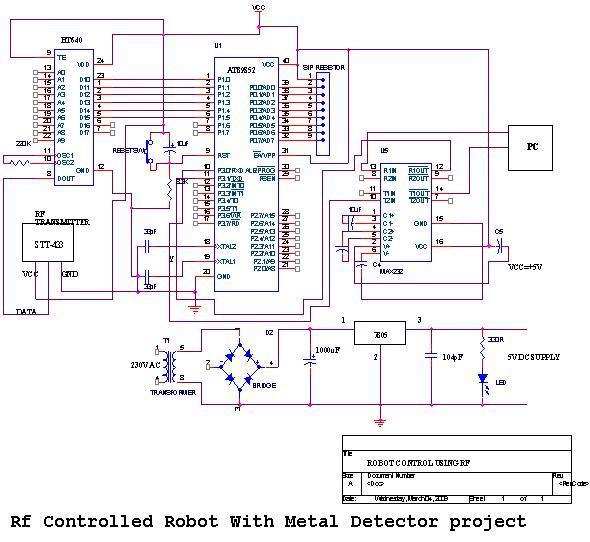
An embedded C-based RF-controlled robot equipped with a metal detector, along with wireless image and voice transmission capabilities. This project report is intended for electronics and communication engineering students. The project involves the design and implementation of an RF-controlled robot...