
Positioning Systems for Bed Profiling in Hydraulics Physical Models
The described system operates through a combination of mechanical and electrical components that work in unison to achieve precise bed profiling. The electric motor serves as the primary actuator, providing the necessary force to drive the vertical rod. The potentiometer is integral for feedback control, allowing for real-time adjustments to the position of the probe based on the detected depth. The pressing leaf spring ensures that the probe maintains a consistent pressure against the sediment surface, facilitating accurate readings without causing damage.
The mechanics of the horizontal motion are facilitated by a carriage system, which can be designed to move along a rail or beam. This setup is critical for longitudinal profiling, allowing the probe to traverse the flume's length and capture data across various sediment types. The servo-controlled system enhances the precision of the probe's positioning, enabling it to adapt to fluctuations in sediment topography.
To enhance the performance of the conductivity probes, careful design considerations must be made. Multi-electrode configurations can be employed to increase sensitivity and reduce the impact of environmental variables. Additionally, calibration procedures should be established to account for variations in water conductivity, which can affect the accuracy of depth measurements.
Overall, the integration of these components and the careful design of the system are essential for advancing the capabilities of bed profiling devices in hydraulic research, ensuring that they can produce reliable data under a range of conditions.Typical solutions for vertical movement of probe of bed profiling devices (guide wheels, dumpers, brakes, backlash and vibration suppressors not shown). Figure 7. Pictorial description of a complete mechanism for vertical motion of a bed profiler; the electric motor, the potentiometer and the pressing leaf spring are mounted on the back
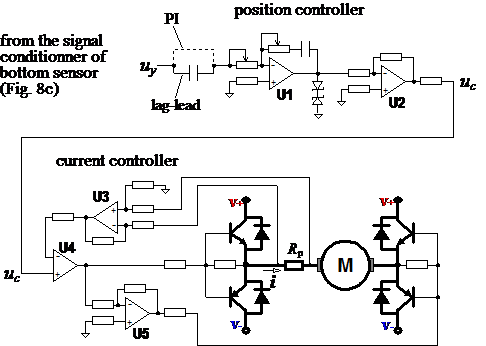
face; guide wheels are not shown. Figure 12. Root locus sketch of the closed-loop system: a) general plan; b) enlarged view near the origin showing the effect of varying the controller pole P c from lag-lead to PI. Figure 15. a) Graphic view of the data acquired for whole flume length. b) Enlarged view of the profiles in the region of interest; c) Photo taken through the last sections of the transparent acrylic wall of the flume.
Physical hydraulic models are commonly used to study complex flow problems in the field of coastal engineering, estuaries, rivers, reservoirs and hydraulic structures. LaboratG³rio Nacional de Engenharia Civil (LNEC) and other hydraulics research institutions developed some kinds of devices for recording bed profiles in flumes and hydraulic basins with varying types of bottom materials (sand, plastic, among others), most of which are based on servo-controlled positioning systems ( Cardoso, 1964 ; Azevedo & Morais, 1989 ; Delft Hydraulics, 2005 ; HR Wallingford, 2006 ; Palma et al, 2008 ).
A common type of apparatus for this purpose consists of a vertical position controlled device driven by a small electric motor with a mechanical transmission actuating a rod as depicted in Fig. 1. At the lower end of the rod there is a probe which is the bottom sensor used for the tracking the rod point under water closely to the sediment bed.
Sediments like sand or mud are often very weak materials and require contactless detection in order to prevent their destruction by the sensing probe itself. The vertical displacement of the moving elements out of water is converted into an electric signal representing depth.
The longitudinal profile recording is performed by the horizontal motion of the vertical servo controlled device, usually placed in a carriage or chariot, with rail or beam guidance; the horizontal (translation) movement may be done either by motorized or manual displacement. A delicate part in this domain of application is the capability to detect very closely the bottom of a hydraulics flume or basin without effective contact and with good tracking capability, in order to avoid the penetration and destruction of the bed material.
The problem will be addressed by appropriate design of multi-electrode conductivity probes taking into account also the need for compensating disturbance effects. Rough bed surface, variable granular sediments, water conductivity variations due to temperature and salinity, and also electromagnetic interference, are among the most disturbing causes that influence the sensing and servo-control performance.
In the following sections a number of problems and solutions for sediment bed profile tracking in hydraulics laboratory studies are discussed. An overview of solutions for vertical and horizontal motion control will be presented and discussed in the following, as regards both to the mechanical and the electrical drive subsystems.
Experimental results from its application to a particular hydraulics study are shown. Particular attention is devoted to special phenomena and details that, not surprisingly, are decisive for achieving high-quality implementations. The method that will be described in detail is based on the principle of a servo controlled vertical rod having a tip probe to detect the bottom by rapid electric conductivity variation.
This method of transduction is used in several institutions (e. g. Delft Hydraulics, 2005 ; HR Wallingford, 2006 ). Its merits consist of providing high accuracy (reaching the order of tenths of a millimetre), good spatial resolution (in 🔗 External reference
Related Circuits
The simulation of behavioral DSP designs alongside analog/RF circuit designs is essential for the successful integration of components, devices, and subsystems in modern wireless applications. Verifying the effects of real-world analog/RF issues on DSP algorithms, and vice versa, within...
This circuit is designed to power a lamp or other appliance for a specified duration of 30 minutes, after which it automatically turns off. It is particularly useful for nighttime reading, as it can turn off a bedside lamp...
The 1C foot VIII developed a training device, utilizing the trigger terminal CI for a positive input pulse. It concludes by providing a quotient output level. The system involves a commercial electric circuit featuring a buck converter, which limits...

The design of solar panel systems with a lead-acid buffer battery is typically configured to ensure that the battery remains charged even during periods of limited sunlight. Solar panel systems integrated with lead-acid buffer batteries are designed to optimize energy...
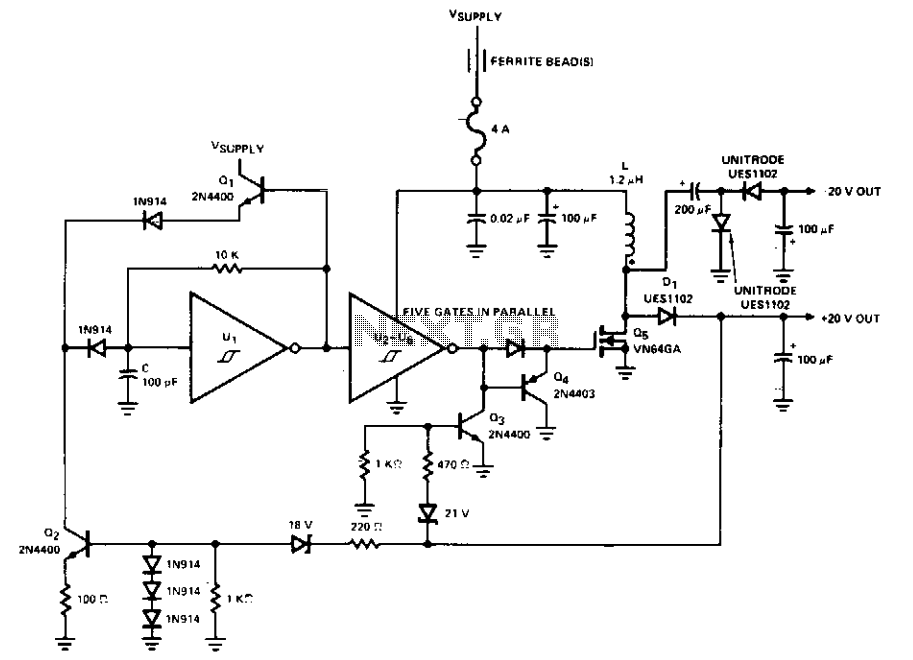
This PWM control circuit generates control pulses for the DMOS power switch in the flyback circuit. The PWM output produces a pulse width that is proportional to the input control voltage, with the repetition rate governed by an external...
The purpose of this circuit is to power a lamp or other appliance for a specified duration (30 minutes in this case) and then automatically turn it off. This functionality is particularly useful for reading in bed at night,...