
Robotics Page
The described circuit focuses on a compact photovore design, which is a type of robot that moves towards light sources. This circuit typically employs light sensors, such as phototransistors or photodiodes, which detect ambient light levels. The output from these sensors is fed into a microcontroller or a simple comparator circuit that determines the direction of movement based on the light intensity detected by each sensor.
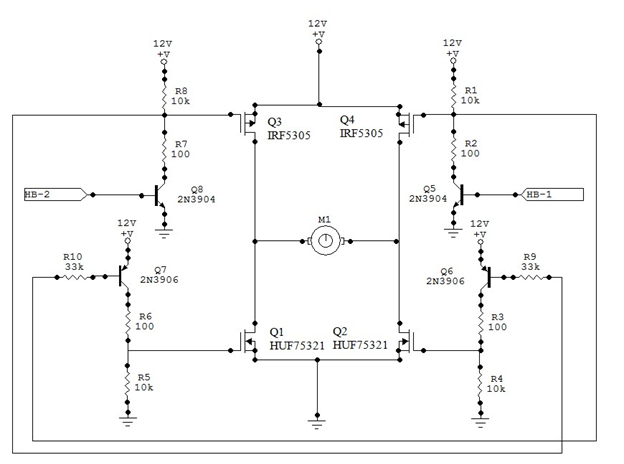
For the four-motor walker, a dual H-bridge motor driver can be utilized to control the motors' direction and speed. Each motor can be connected to a dedicated output pin from the microcontroller, allowing for precise control of the robot's movement. The design should include a power supply circuit capable of providing sufficient current to the motors while maintaining stable voltage levels.
In the case of the five-motor walker, the additional micro servo can be used for steering or to provide additional functionality, such as raising or lowering a sensor. The use of micro servos allows for fine control and can be integrated with a feedback system to adjust the walker’s posture based on the terrain.
For the lightstorm pummer, a simple LED driver circuit can be implemented to control the brightness of the white and blue LEDs. A PWM (Pulse Width Modulation) controller can be used to create varying light patterns, enhancing the visual display.
In the Moon-Walker design, the two-motor configuration can be simplified with a basic chassis setup, ensuring that the center of gravity is well balanced to prevent tipping over during movement. The motors should be selected based on their torque ratings to ensure they can adequately support the weight of the robot.
The schematics for the Black Vermin and Tank robots should include detailed component layouts, specifying the values for resistors and capacitors, as well as the connections between the sensors, motors, and control circuitry. Proper documentation will assist other builders in replicating these designs effectively.
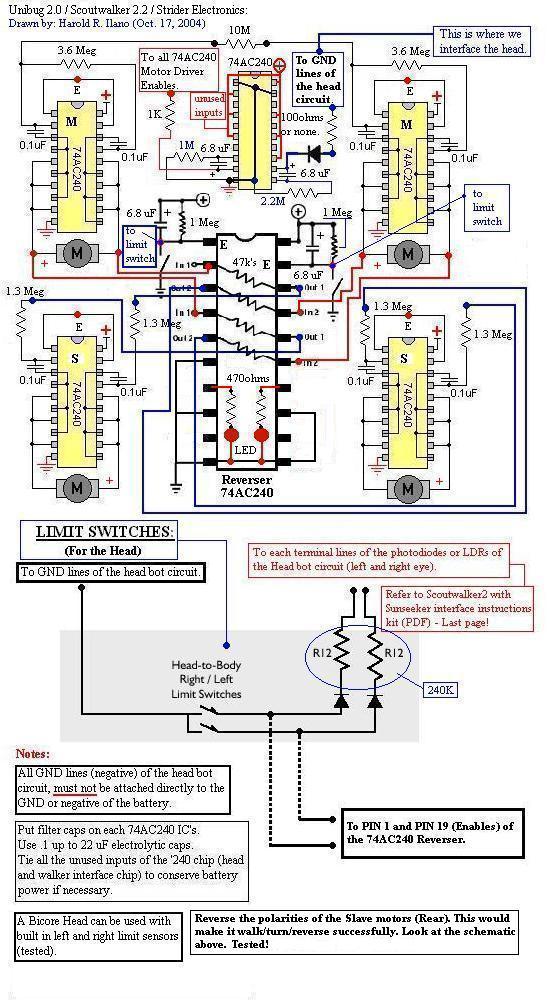
Future projects, including the Strider-style bot, will require careful selection of servos and motors to match the desired performance characteristics. Researching local suppliers for suitable components will be essential to facilitate the successful completion of these robotic designs.This is just my attempt in making the simplest and kinda smallest photovore. Well, it`s not that good-looking though, but it`s a great start for some beginners. It`s also my own version of Dozer photovore. Right here! Woah, it`s been a long time since my last update here my friends! Anyways, here`s my latest robot that I`ve built. Its name is Trooper, a scoutwalker 2 based. 4-motor walker. Real small than the original. Yes, it`s possible! Take a look at it here. Enjoy! Yes sir, it`s another 5-motor walker creation! It uses 5 micro servos, well. all I can say to this bot is, it`s a cutee! Please check it out! Enjoy guys! Click here ! I`ve also uploaded an old video clip of my lightstorm pummer here. The super-bright white and blue LED`s were inserted inside the white crystal rock thing (I drilled 2 holes), that forms a cloud-like look. A cool display though, on top of your TV set! Hi guys! Well, I just made another cool robot. It`s a 2-motor walker, inspired from one of Mark Tilden`s bots as seen on "Robots Rising" video (from Discovery Channel).
I named this bot "Moon-Walker". It moves slowly, like walking on the moon. Anyway, just click the link below to go to its page. Enjoy! ;-) Well, there`s nothing much on this update. I just placed a link on Black Vermin and Tank`s schematic diagram. This is for those who e-mailed me a few days ago and to all BEAMers out there. Here it is guys! I hope it would help you out, `coz these are the exact diagrams which I`ve used. I just played with some parts, namely the caps and resistor values to satisfy my taste. I`ve also made several kinds of leg shapes (really tough though!) and weight balancing. It was really "pure" hard work and patience. I`m not kiddin`! Anyways, I`m planning to build a certain kind of walker and a photovore, but I don`t know when and what. I just thought of making a Strider style bot or a smaller version of Black Vermin (just like the size of Walkman).
Well, I`ve been busy with many things especially with my family for quite some time. But right now, I`m craving to make more interesting robotic creatures. let`s just wait and see! Wish me luck! ;-) If you have any questions or anything regarding my work, please e-mail me or make a topic in Yahoo BEAM group, I`ll be there anytime. Thanks and happy BEAMing! Goodluck and best regards to all ! I have made another page for you guys (just to share with). It was all about Tank`s earliest designs and how I made it, with tons of pics and some old video clips too.
The Strider project was cancelled, sorry guys :-). Well, the servos I bought were not suitable for this type of bot because of its speed (RPM), etc. Instead, we could use servos in many walkers or even in wheeled robots. I could make a Strider-style bot if I could get those motors which Strider used. where the hell I can get those anyway (especially in my country) But right now, I`m on something else, and it`s gonna be cool. First of all, I wou 🔗 External reference
Related Circuits
Renewable energy discussions encompass various alternative energy, renewable energy, and free energy technologies. Discussions about environmental issues, global warming, and other related topics are also welcome. It is important to address the validity, organization, and general advice concerning the...
The TINAH board shield is a printed circuit board designed for the Phys253 course, first utilized in 2009 by Engineering Physics students and faculty. This shield functions as a buffer to protect the digital and analog inputs and outputs...
The purpose of this page and its subpages about members of the Z80 family (and close relatives) is to collect and share information and useful ideas. There are many individuals who have developed effective utilities and hardware solutions. This...
The following circuit illustrates a Robotics IR Navigation Sensor Circuit Diagram. Features include one chip, the 74HC04, and the IR sensor is designed to operate in direct sunlight. The Robotics IR Navigation Sensor Circuit utilizes an inverter IC, specifically the...
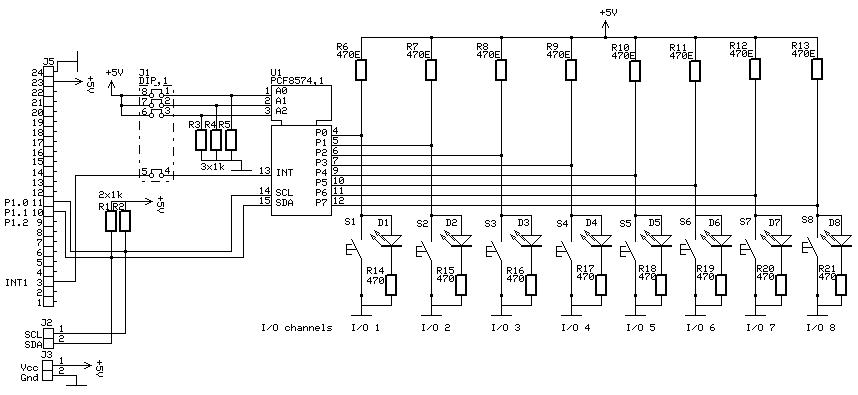
This I2C expansion board for microcontrollers enables the connection of 8 switches or 8 LEDs using only two wires. The I2C expansion board is designed to facilitate the integration of multiple input or output devices with minimal wiring complexity. By...
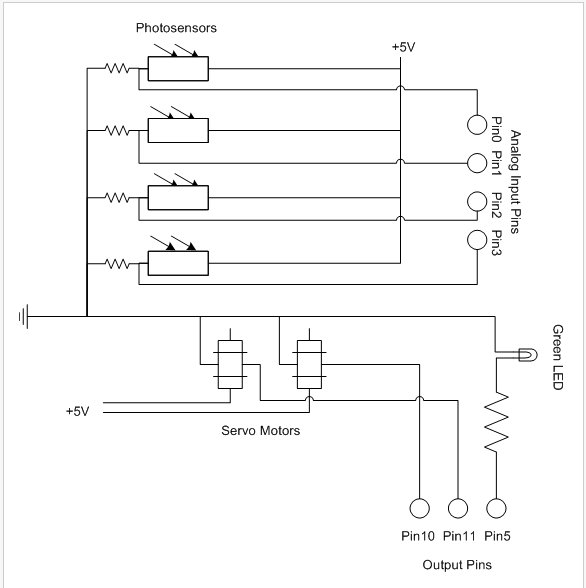
The PhytoBot is a semi-intelligent plant that reacts to external stimuli, specifically light intensity and light location, mimicking the behavior of a phototropic plant. It is designed as an interactive artwork intended for prolonged operation. The motivation behind this...