
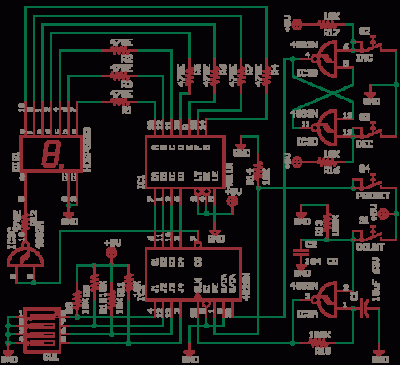
Roverbot circuit
The provided text outlines the foundational principles governing robotic behavior, often referred to as the Three Laws of Robotics. These laws are designed to ensure that robots operate safely and ethically in relation to humans.
In a practical application, these principles can be integrated into the design of robotic systems through various electronic components and programming methodologies. For instance, safety mechanisms can be implemented using sensors and actuators that monitor human proximity and environmental conditions.
1. **Safety Mechanisms**: To adhere to the first law, a robot can be equipped with infrared sensors or LIDAR systems to detect human presence. If a human is detected within a predefined safety zone, the robot can automatically reduce its speed or halt operations to prevent injury.
2. **Command Processing**: The second law can be implemented through a command and control system, where the robot's microcontroller processes input from users. This can be achieved using a combination of a user interface, such as buttons or voice recognition systems, and a central processing unit (CPU) that interprets commands. The programming logic must include conditional statements that prioritize the first law over any commands that could potentially cause harm to humans.
3. **Self-Preservation**: The third law can be addressed by incorporating self-diagnostic routines within the robot's firmware. This allows the robot to monitor its own systems, such as battery levels, motor functions, and structural integrity. If any critical failure is detected, the robot can execute a safe shutdown procedure or enter a standby mode to prevent further damage.
Overall, the integration of these laws into robotic design requires a careful balance of hardware and software components, ensuring that safety, obedience, and self-preservation are effectively managed in real-time operational scenarios.1. A robot may not injure a human being or, through inaction, allow a human being to come to harm. 2. A robot must obey the orders given to it by human beings, except where such orders would conflict with the First Law. 3. A robot must protect its own existence as long as such.. 🔗 External reference
Related Circuits
Modify it to click and latch a relay when the button is pressed from anywhere in the house. Additionally, if possible, unlatch the relay when pressed again. A flip-flop circuit may be created to take the first signal and...
This inductance meter serves as an adapter for a digital voltmeter (DVM), enabling the voltmeter to measure the value of inductors. The inductance meter is particularly useful in designing switch mode power supplies, as it often requires hand-winding coils...
The CD4538 is a dual Monostable Multivibrator. When triggered, the chip generates a single pulse or a high-low event. The T+ pin (pin 4) of U1a serves as the positive edge trigger input, while the T- pin (pin 5)...
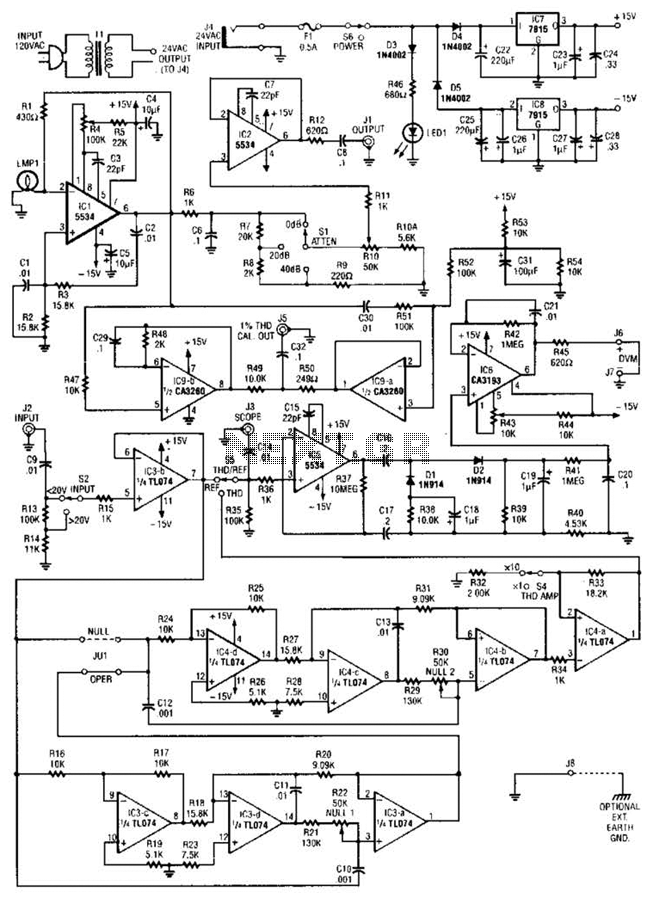
The circuit comprises a low-distortion, 1-kHz oscillator designed to measure Total Harmonic Distortion (THD) at a user-selected voltage level, suitable for voltage amplifiers or for testing amplifiers with power levels up to 600 W. It is capable of detecting...
This is another kit in our self-sufficiency range. We also have a 12v fluoro inverter kit for those who need to operate 20watt to 40watt fluorescent lamps from a 12v supply. We will be introducing a number of kits...
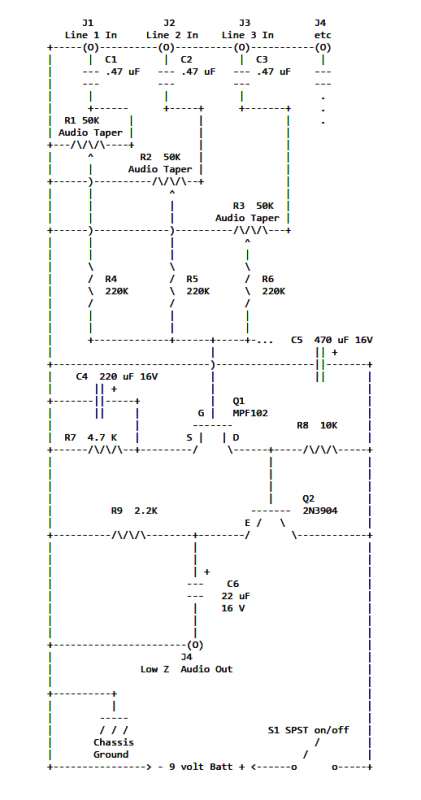
If two of these circuits are made in the same enclosure for stereo, then there can be a single power supply to run both of them. There should be a resistor in series with the incoming 9V+ lead so...