
SemiAutonomous Submersible robot for underwater research
The described submarine construction employs two C channels as the primary structural elements, which are interconnected with an aluminum sheet for enhanced rigidity and support. The design incorporates a skid at the base, which is critical for enabling the submarine to maneuver smoothly over various substrates while conducting ecological observations. The use of the skid is essential for minimizing drag and facilitating the collection of video data, which is crucial for quantitative analysis of the environment.
The weight of the assembly, due to the inclusion of the skid and C channels, presents a challenge for the vertical motor's performance. The motor is responsible for the submarine's vertical movement, and the excess weight can impede its ability to navigate effectively. The suggestion to reduce the overall weight of the submarine is significant, as it would optimize the performance of the single vertical trolling motor, allowing for more reliable vertical mobility.
In terms of software integration, the SmartConsole program serves as a vital interface for data acquisition and visualization. It operates within the limitations of older operating systems, enabling real-time graphical representation of sensor data, which includes parameters such as tilt and yaw. This interface is crucial for operators to monitor the submarine's orientation and stability during operation.
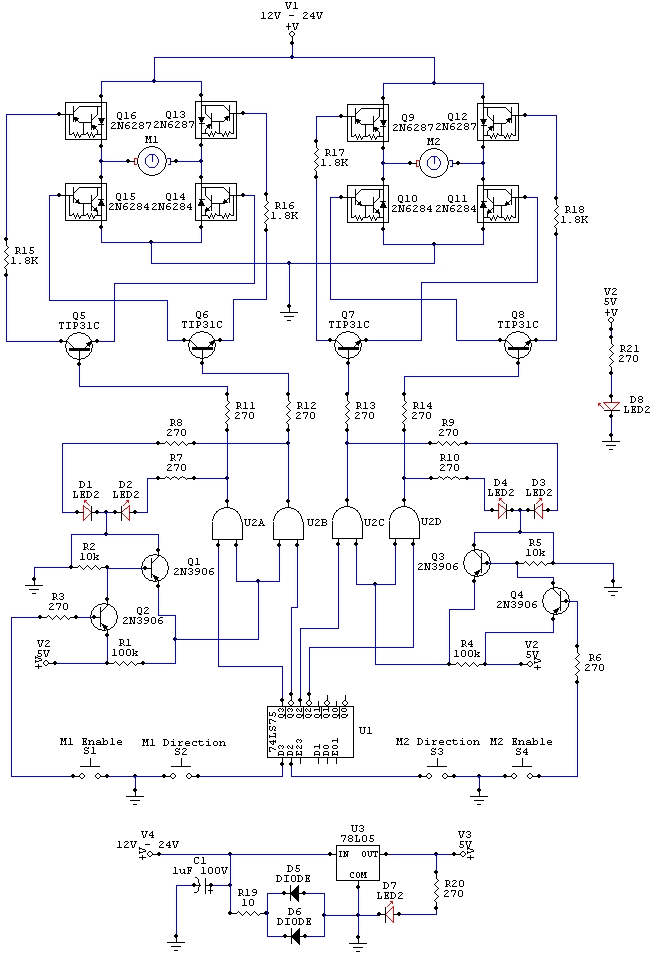
Additionally, the SmartSea program, designed for the BSX Basic Stamp, highlights the importance of microcontroller selection in sensor interfacing. The decision to use a BSX, despite its limitations in pin availability, reflects the practical considerations in the design process. The presence of an alternative Basic Stamp in the schematic indicates foresight in accommodating additional sensor interfaces if required, thereby enhancing the submarine's operational capabilities. Overall, the construction and software integration of this submarine reflect a thoughtful approach to ecological data collection and analysis, balancing structural integrity with functional performance.the rest of the pictures show the construction of the sub. It was made out of two C channels connected by an aluminum sheet. A skid was added to the bottom to allow the sub to skate over the bottom to gather quantitative video samples of the ecology. The skid and two C channels (necessary to hold the large # of sensors desired) was a little heavy so the sub had trouble moving up and down using it`s one vertical motor (although there is a fourth small motor in the diagram, we never added that). You should definately be able to make the body a lot lighter so that a single vertical trolling motor will be fine.
-SmartConsole. bas is a QBasic program that runs in DOS or win3. 1 It`s an interface that takes data from the subs sensors and displays them graphically on the screen (tilt, yaw, etc) -SmartSea. bsx is a basic program that runs on the BSX basic stamp (while building the thing I used a BSX, I put another basic stamp in the diagram because the bsx had one too few pin for sensor interfaces)
🔗 External reference
Related Circuits
This Project Line Following Autonomous Robot is based on 8 bit Microcontroller AT89C2051. This Robot follows the black line which is drawn over the white surface or it follows the white line which is drawn over the black surface....
The wiring schematic played a significant role in the robot. This diagram is used to graphically display all the wiring of the motor-controlling micro-components that enabled the robot to physically move forward, backward, left, right, and stop. This diagram...
The figures above illustrate the fundamental concept of a robot, which consists of various input and output devices connected to a central processing unit, commonly referred to as the brain. These inputs and outputs are essential for the robot's functionality...
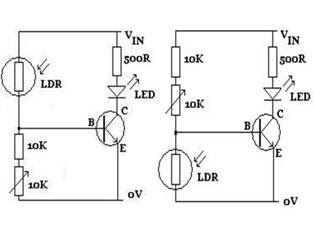
To enable a line-following robot to identify the line, it is essential to first detect the line itself. Several methods can be employed to distinguish a black line on a white background, or vice versa. One effective approach is...
A robot that operates when you send messages through your phone. Your mobile device serves as the remote controller for the robot. This means that if the robot is in London and you are in Mumbai, you can still...
For a robot to perform its assigned tasks, a controller is necessary. This controller may be mechanical, electrical, electronic, or a combination of these. It acts as the brain of the entire system, providing the robot with its intelligence....