
robot circuits
The described controller system integrates both vision and obstacle detection functionalities, enabling the robot to navigate its environment autonomously. The vision system, based on photovoltaic cells, allows the robot to assess the surrounding light conditions and identify potential obstacles that can be scaled. The use of infrared waves for obstacle detection complements this by providing real-time feedback on immediate obstacles, ensuring the robot can make informed navigation decisions.
The architecture of the controller likely includes microcontroller units (MCUs) that process the signals from the PVCs and the infrared system, allowing for seamless coordination between the various components. The MCU can be programmed to execute algorithms that determine the robot's movement based on the feedback received from the sensors. Furthermore, the integration of the UA741 operational amplifier and BC548 transistor ensures that the signals are adequately amplified for processing, allowing for accurate detection and response to the environment.
In summary, the controller for the Autonomous Legged Intelligence Exhibiting Navigator, Alien, is a sophisticated system that leverages various electronic components to provide sensory feedback and control, enabling the robot to navigate and perform tasks effectively in its designated environment.For any robot to perform the tasks it is assigned, a controller is required. The controller may be mechanical, electrical, electronic or a combination of these. It is the brain of the entire system and gives the robot its intelligence. Additional functionalities that a controller may possess will indicate a higher level of intelligence exhibited b y the manipulator. The basic necessity for any control is a capability to sense the factor to be controlled. Sensing implies feedback, which is a means to realize the status of a physical occurrence so that corrective measures can be employed upon the realization of an error. If no path is available on either side, move back a step and check if a path is available on either side.
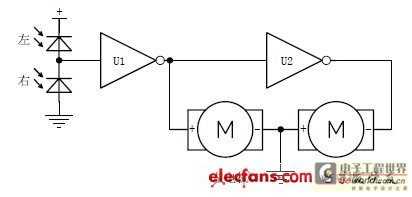
This step is to be repeated until a path is found. Integration of all these components with the manipulator leads to an Autonomous Legged Intelligence Exhibiting Navigator, Alien. The following sections explain in detail, the various sub-systems that make up the controller. Alien`s vision system involves a pair of photovoltaic cell (PVC) with two monocular lenses as photoreceptors.
This PVC is the core sensor of the system and the voltage across each cell varies according to the 1/(d ²) law of Luminous intensity i. e. , greater the distance lesser the intensity. The PVC receives light reflected from an object or an obstacle under surveillance and represents the intensity in the form of a voltage across the terminals (usually in mV).
This voltage is then amplified through a UA741 IC. The amplified voltages from the two receptors are subtracted and this value is compared with a reference voltage that is predetermined by experimented values. The comparator gives an output to signify the presence of an object that can be climbed or an object that cannot be scaled.
Figure 3. 1 depicts the logic flowchart of the vision system. The two monocular lenses are focused upon points that resemble the rise` and go` of a stair (obstacle that can be scaled by the robot) as shown in figure 3. 2. In the case of an object that can be scaled by the robot, the difference in light intensities is high, while for an object that cannot be scaled the difference is minimal.
The final version of the vision system resulted after a vast amount of experimentation. The number of PVCs used was considerably reduced as compared to the system used in ROVIS (an REC Trichy student project done under our external guide`s supervision in 1998). Several methods of obstacle detection sensing exist. We had opted to use a non contact method of obstacle detection by bouncing off waves from the obstacle and receiving these waves.
Using ultrasonic waves for this purpose is an effective method since its usage is not generally hampered by extraneous ambient noise. We experimented with this method but finally abandoned it since the results obtained were fairly inconsistent.
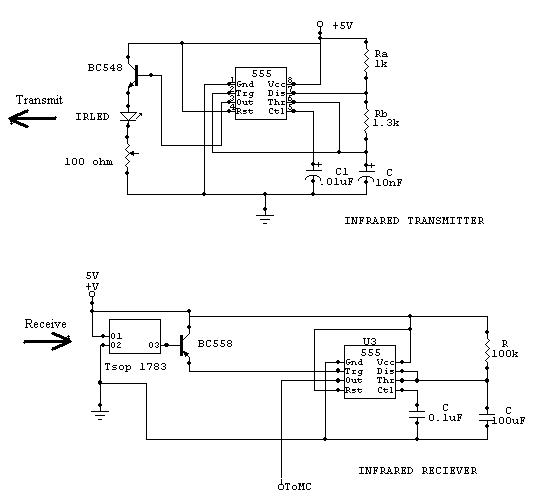
The obstacle detection system finally devised for Alien uses infrared waves to detect an obstacle in front of it. The drawbacks of using infrared waves are: a limited range that the wave can travel without dispersal, and the inconsistency of the intensity of the reflected waves which is dependent on the material and colour of the obstacle.
The system consists of an infrared transmitter and receiver that are both synchronized by the Master Controller. This circuit is used to transmit Infrared waves when triggerd by the Master Controller. It uses an Infrared LED that sends out a pulse of waves at a predetermined frequency set in the 555-timer.
The frequency of transmission that we selected is 40277. 7 Hz. The frequency was set by using appropriate values of resistances of Ra, R b and capacitor C that are connected to the timer. The frequency is determined by the formula: - The output of the timer is amplified using BC548 and the variable resistance of 100 ohms is used to vary the distance of transmission.
This value of resistance 🔗 External reference
Related Circuits
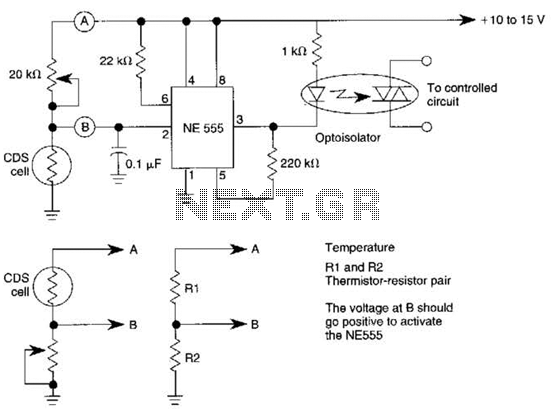
This dark-activated relay switch can be utilized to activate walkway or other outdoor lighting at dusk. By employing alternate connections to points A and B, it is capable of sensing varying levels of illumination, as well as high and...
The circuit is designed to operate with an audio power amplifier that uses 18V-0V-18V power rails. The specific voltage is not critical, but the feedback is referenced to an LED chain connected to a 12V rail, necessitating a separate...
The strategy focused on efficiently navigating complex terrain with superior speed. The objective was to score in the lowest scoring goal by acting quickly to limit the opposing team's points. The mechanical and electrical designs prioritized speed, resulting in...
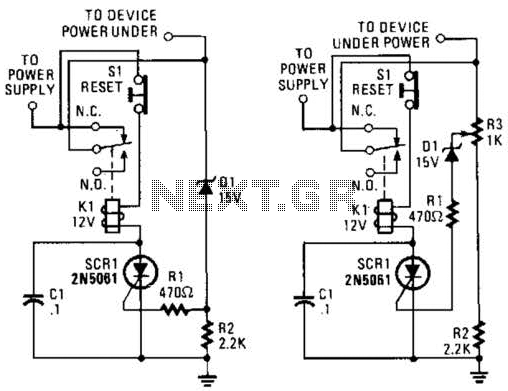
If circuits experience frequency overvoltage conditions, continually replacing blown fuses can become quite costly. This shutdown circuit addresses that issue by substituting the fuse with a relay and a low-current SCR. When the input voltage exceeds the threshold established...
This text introduces a system designed to facilitate smooth robotic operations using the 74HC240 integrated circuit. It emphasizes the implementation of low-cost technology that is accessible to everyone. The Schmitt trigger's threshold voltage is a critical aspect of the...
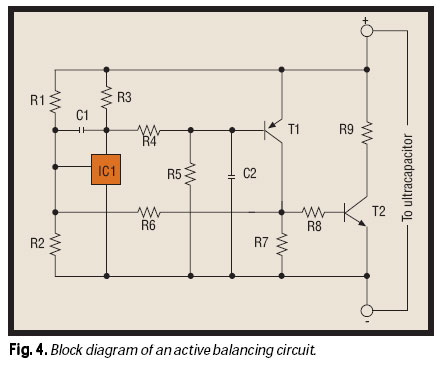
As the market seeks lighter, more compact wireless and portable devices with innovative features packed into increasingly constrained spaces, there is a concurrent pursuit for the next power supply innovation—a powerful, compact, long-lasting, economical, and safe battery. Although advancements...
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713