
Solid state winch control
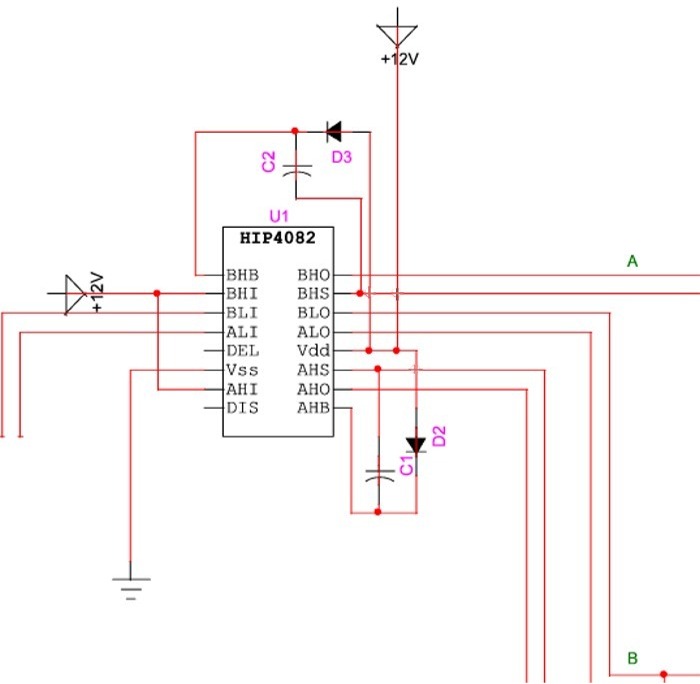
The proposed solid-state control system aims to replace the traditional solenoid-based mechanism with a more reliable and cost-effective solution. The design would incorporate high-power MOSFETs or IGBTs (Insulated Gate Bipolar Transistors) to handle the current required for the winch operation. These semiconductor devices can switch on and off rapidly, providing efficient control over the motor's power input and output without the mechanical wear associated with solenoids.
To achieve the necessary functionality, the circuit would include a microcontroller that manages the switching of the MOSFETs or IGBTs based on user inputs. This microcontroller can be programmed to handle various operational modes, such as power in and power out, using pulse-width modulation (PWM) techniques to control the speed of the winch motor.
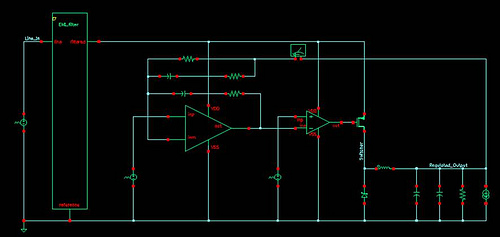
Protection features should also be integrated into the design to enhance reliability. This may include current sensing to prevent overload conditions, thermal protection to avoid overheating, and reverse polarity protection to safeguard the components. Additionally, snubber circuits can be included to suppress voltage spikes caused by the inductive load of the winch motor, which can otherwise damage the control circuitry.
The overall circuit layout should be designed for optimal thermal management, ensuring that heat generated by the power devices is effectively dissipated. Heatsinks may be required, and the placement of components should facilitate airflow.
In summary, the transition from a solenoid-based control system to a solid-state solution for the Warn 8274 winch presents an opportunity to enhance performance, reduce costs over time, and improve reliability, ultimately leading to a more efficient and durable winching operation.I am interested in building a solid state control for my Warn 8274 self recovery winch. The current control scheme uses 4 constant duty 200 amp solenoids. 2 switched in parallel to connect the field 1 terminal on the motor to the armature for power in, and the other two in parallel to connect field 2 to the armature for power out. The solenoids are quite expensive, and during prolonged use, will occasionally weld themselves closed, and require replacement
🔗 External reference
Related Circuits
A circuit is being designed to drive a 4x7 segment display using a PIC microcontroller. The previous implementation utilized four pins to control each of the four digits individually, with a sequential activation method. The designer aims to simplify...
Connect with Cadence technologists and peers in the Cadence Community. Stay informed about technology trends, news, and opinions through blogs, forums, and social networking. The Cadence Community serves as a collaborative platform for professionals in the electronics design automation (EDA)...
The Maxim MAX 6665 provides a complete temperature-dependent fan controller. It can switch fans operating at voltages of up to 24 V and currents of up to 250 mA. The IC is available from the manufacturer in versions with...
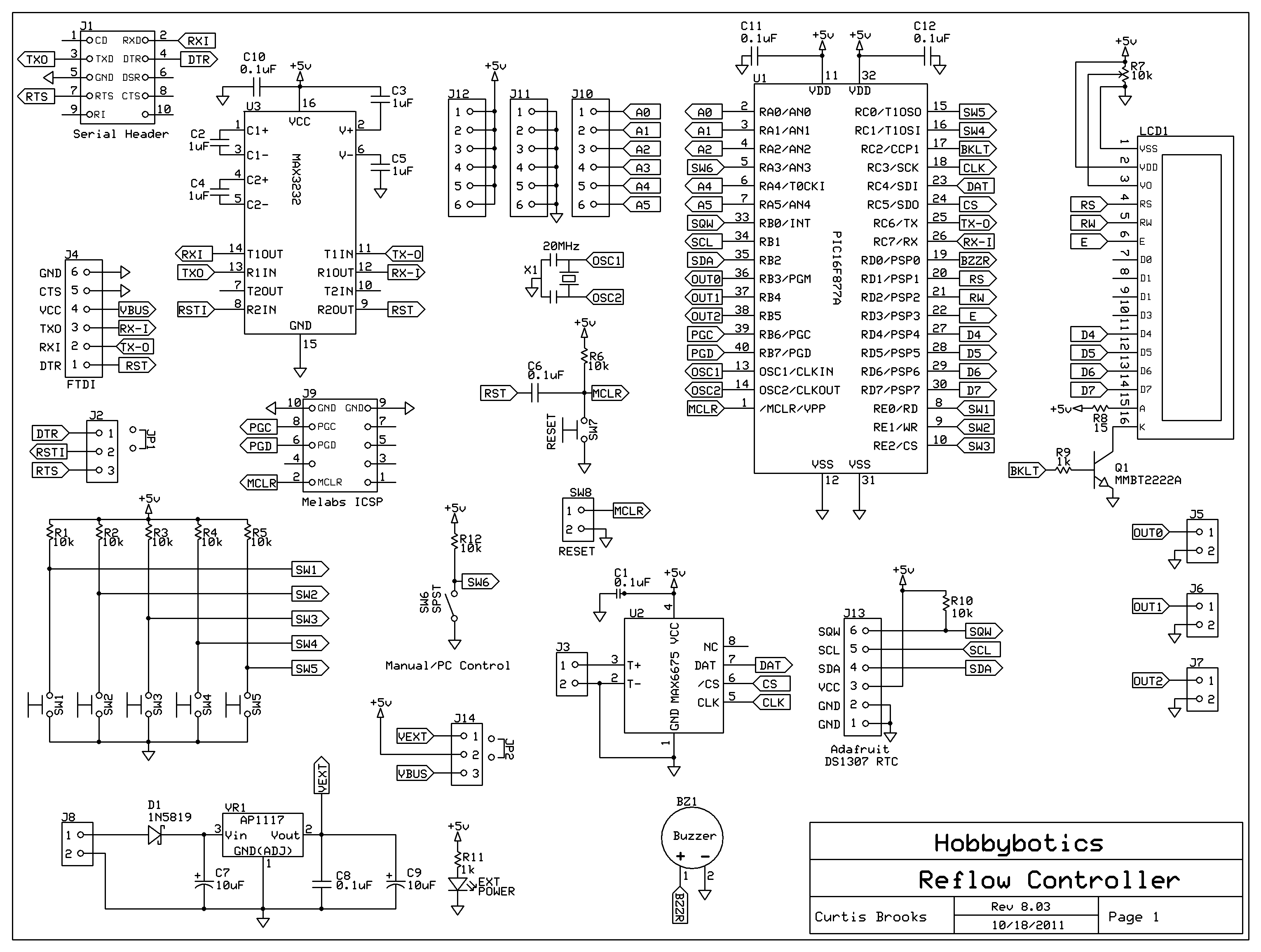
Introduction to the Reflow Process and PID Controller Circuit Documentation. This document discusses the benefits of using Surface Mount Devices (SMD) in circuit design, highlighting advantages such as reduced size and cost compared to traditional through-hole components. The reflow soldering...
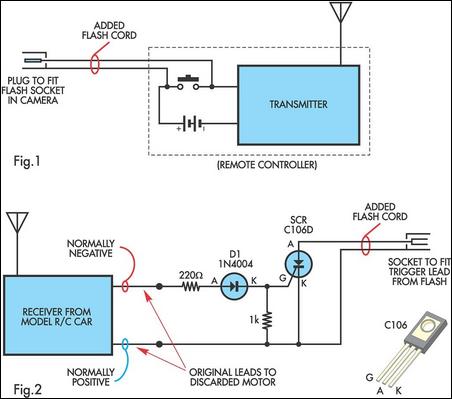
A radio-controlled electronic flash is an essential tool for any photographer's kit, frequently utilized by professionals. For instance, a wedding photographer may position one behind the bride to illuminate her gown and veil without visible wires in the shot....

A circuit for car windshield/wiper motor speed control built using an NE 555 IC. This enables intermittent windshield wiper control, which changes the sweep rate to 10 seconds. The circuit utilizes the NE 555 timer IC configured in astable mode...