
stepper motor interfacing connections

Stepper motors are widely used in various applications requiring precise control of angular position, speed, and acceleration. They are particularly useful in robotics, CNC machinery, and 3D printers due to their ability to divide a full rotation into a large number of steps. The interfacing of stepper motors with microcontrollers allows for the implementation of complex control algorithms that can enhance the performance of these motors.
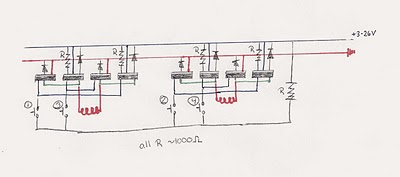
The two primary types of stepper motors are unipolar and bipolar. A 6-lead unipolar stepper motor typically consists of two coils with a center tap, allowing for simpler control since current can flow in one direction through each coil. In contrast, bipolar stepper motors have two coils without a center tap, requiring more complex control circuitry to reverse the current direction.
Microcontrollers can control stepper motors in two main modes: full-step and half-step. In full-step mode, the motor is driven by energizing one coil at a time, resulting in a step size equal to the motor's step angle. Half-step mode alternates between energizing one coil and both coils together, effectively halving the step size and allowing for smoother motion and improved resolution.
To implement stepper motor control, a microcontroller can be programmed to send signals to a driver circuit that interfaces with the motor. The driver circuit is responsible for managing the current flowing through the motor coils and can include components such as H-bridges or dedicated stepper motor driver ICs. The microcontroller's output pins are connected to the driver inputs, and the control logic can be implemented using simple timing loops or more sophisticated control algorithms depending on the application's requirements.
In summary, interfacing a stepper motor with a microcontroller involves understanding the motor's operating principles, selecting the appropriate type of motor, and implementing control strategies to achieve the desired performance. This knowledge is essential for designing effective systems that utilize stepper motors for precise motion control.stepper motor interfacing with microcontroller. Full step and half step stepper control. working and basics of stepper motor. 6 lead unipolar stepper motor tutorial, Bipolar Stepper Motor tutorial.. 🔗 External reference
Related Circuits
There was difficulty in understanding that the Source pin connects to low voltage (source of electrons) and the Drain pin connects to high voltage (absorbs electrons). This concept is fundamental to basic electricity, but it required some time to...
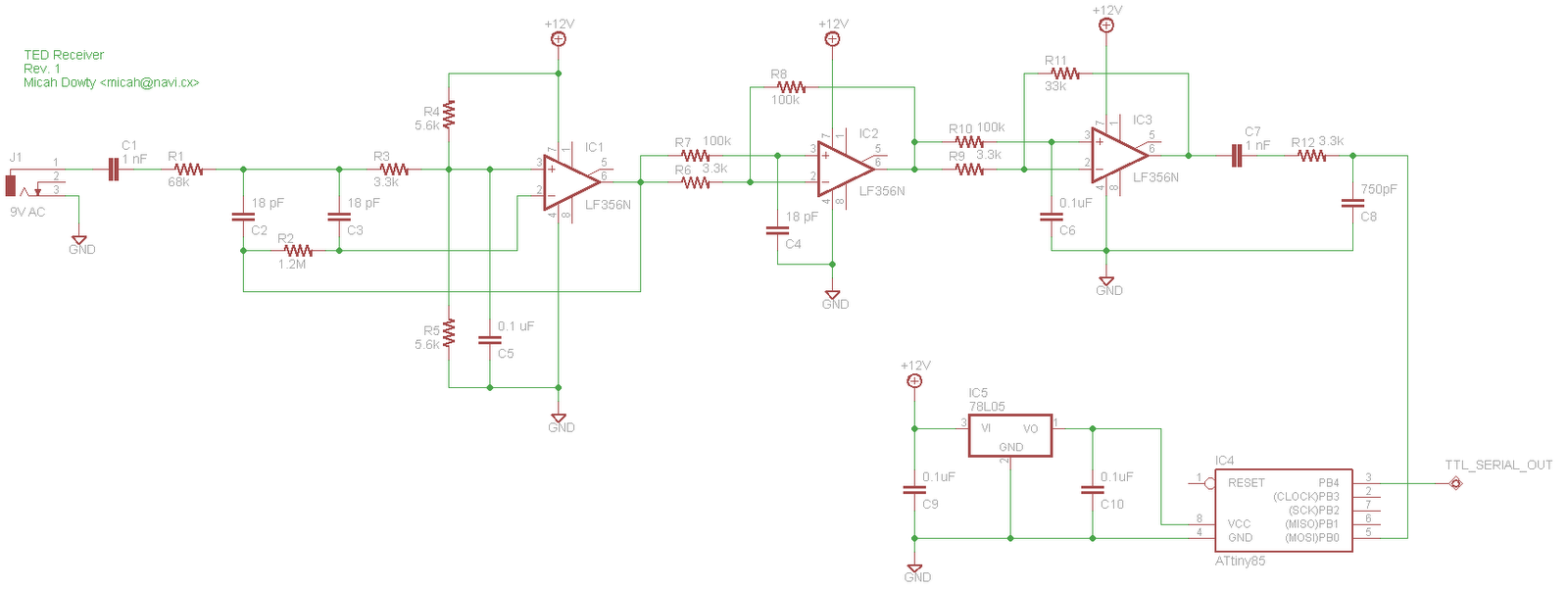
The Energy Detective (TED) is an affordable and user-friendly device designed to monitor the electricity usage of an entire household. It functions similarly to a more advanced version of a traditional utility company power meter, which can be conveniently...
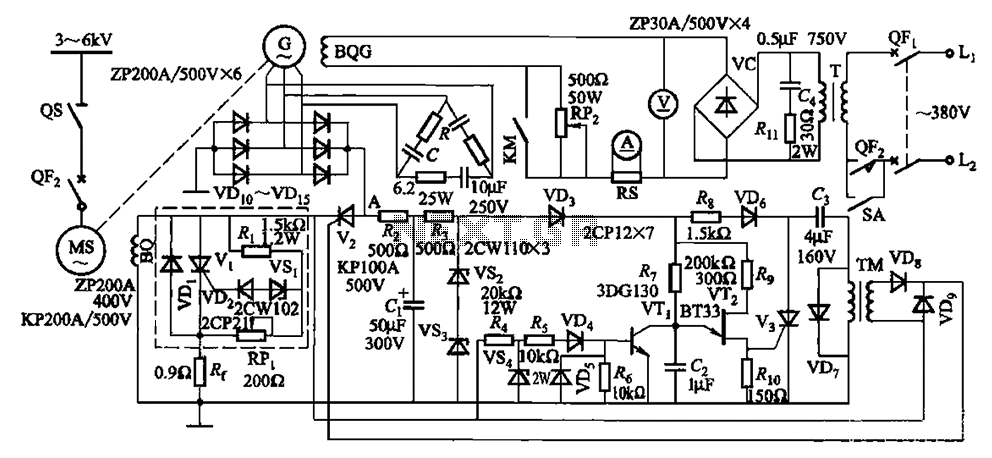
The circuit depicted in Figure 16-105 illustrates a synchronous motor. The components include BQ, which represents its field winding, and G, which denotes the AC excitation for the motor. The notation BQG indicates the field winding, with an empty...
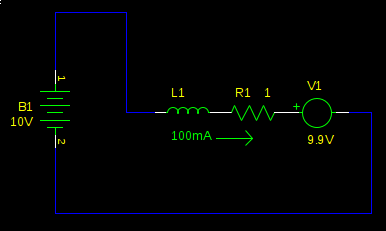
Many electric vehicles can convert the momentum of the car into stored energy in batteries, instead of dissipating it as heat in the brake pads. This process is known as regenerative braking. It can be implemented using a motor...

After dismantling a Chinese copy of a Segway, an examination of the motor controller was conducted. After several hours of work with a multimeter, pen, paper, and KiCad, a block diagram and schematic of the motor controller were developed....
There is an advantage in using continuously active PWM signals. The main reason is that the asynchronous frequencies of the PWM core and microcore can sometimes result in a shortened PWM pulse. The servo recognizes this as a command...