
Three-phase six-step motor control circuit diagram composed of MC33035
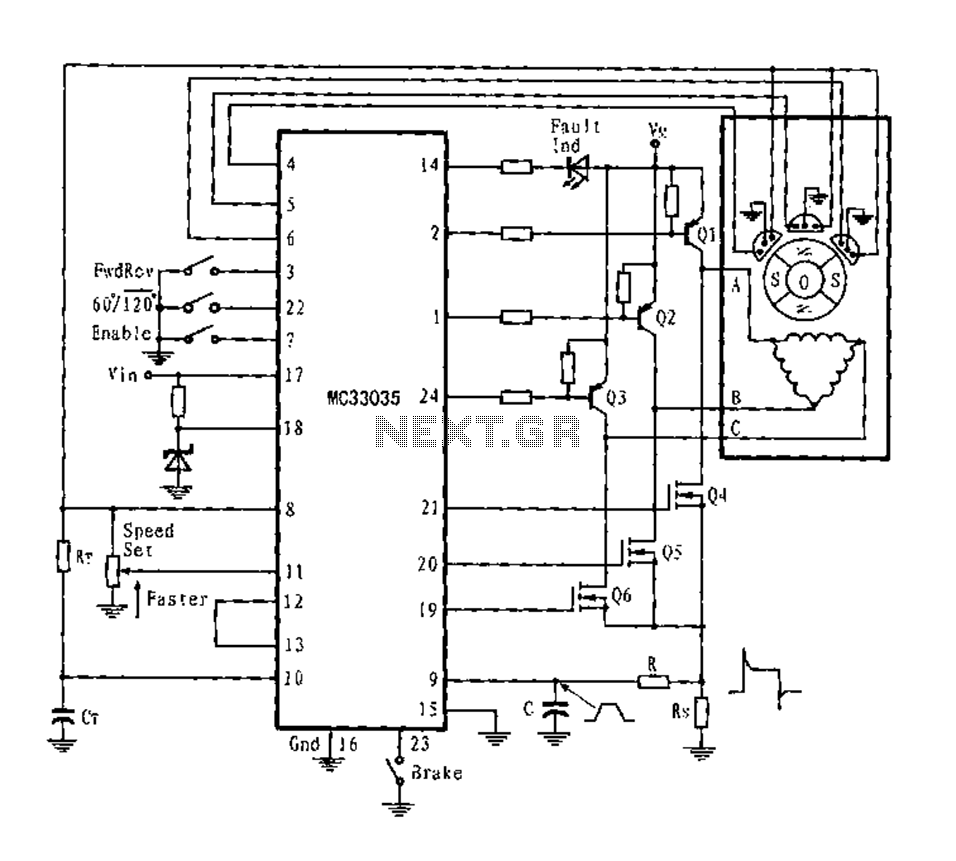
The three-phase full-wave six-step motor controller circuit is designed to efficiently manage the operation of an open-loop motor. The PNP Darlington transistors serve as the primary power switches, providing high current gain and facilitating the control of larger currents necessary for motor operation. The inclusion of N-channel power MOSFETs as lower power switches is critical due to their high efficiency and fast switching capabilities, which contribute to the overall performance of the circuit.
Each transistor within the circuit is equipped with parasitic clamping diodes. These diodes are essential for managing the inductive kickback generated by the stator coils during operation, allowing the energy to be returned to the power supply rather than dissipating as heat. This feature enhances the efficiency of the motor controller and prolongs the lifespan of the components.
The circuit's output configuration allows for flexibility in connecting the stator windings. By supporting both triangular and star configurations, the circuit can adapt to various motor designs and application requirements. The option to connect to a Y-neutral ground further enhances the circuit's versatility, enabling it to operate effectively under different electrical conditions.
In operation, at any rotor position, only one power switch from each totem pole is activated, ensuring that the circuit maintains optimal control over the motor. This selective switching allows for the efficient management of current flow through the stator windings, facilitating two-way or full-wave current operation. Such control is vital for achieving smooth motor performance and minimizing vibration.
To address the issue of leading edge spikes in the current waveform, which can lead to limiting errors and affect the performance of the motor, a peak RC filter is incorporated into the design. This filter effectively smooths out transient spikes, ensuring a more stable current detection input. The use of a low sense resistor (Rs) further assists in reducing these spikes, enhancing the reliability and accuracy of the current sensing mechanism within the circuit.
Overall, this three-phase full-wave six-step motor controller circuit is a sophisticated solution for driving open-loop motors, combining effective power management with adaptive output configurations and robust spike suppression techniques.Fig application circuit is a three-phase full-wave six-step driving an open loop motor controller circuit connection diagram. Wherein the power switching transistor Darlington PNP type, the lower power switching transistors are N-channel power MOSFET. Since each device contain a parasitic clamping diodes, which can power the stator inductive energy returned. The output can drive triangular connection or star connection of the stator, if using a separate power supply, but also to drive the Y-connected neutral ground.
At any given rotor position, the circuit shown in Figure 3 are the only one at the top and bottom power switches (belonging to different totem poles) is valid. Thus, through the rational allocation can switch the stator windings from the power supply to ground at both ends, and allows two-way or full-wave current.
Since the leading edge spikes usually occur in the current waveform, and will result in limiting errors. Therefore, the class can be suppressed by the peak RC filter in series with a current detection input.
Meanwhile, Rs low sense resistor also help reduce spikes.
Related Circuits
The TLE6282G is an H-Bridge and Half Bridge Driver IC designed for high-current DC brush motor applications in PWM control mode. It is suitable for use in injector and valve applications across 12V, 24V, and 42V power networks. This...
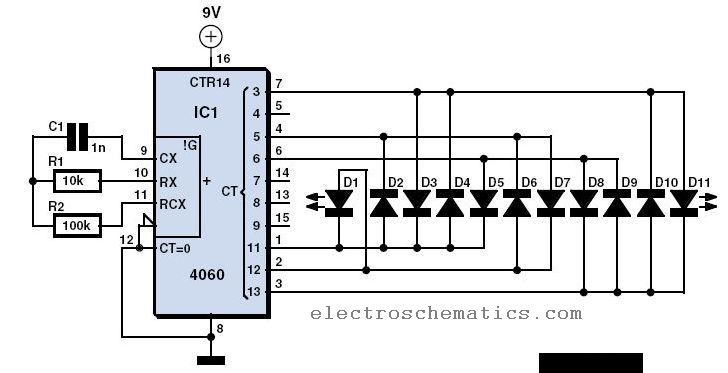
Have you already set up a Christmas tree in your house and decorated it with traditional lights? Build a couple of these LED lights to enhance the Christmas atmosphere. The project involves creating LED lights that can be used to...
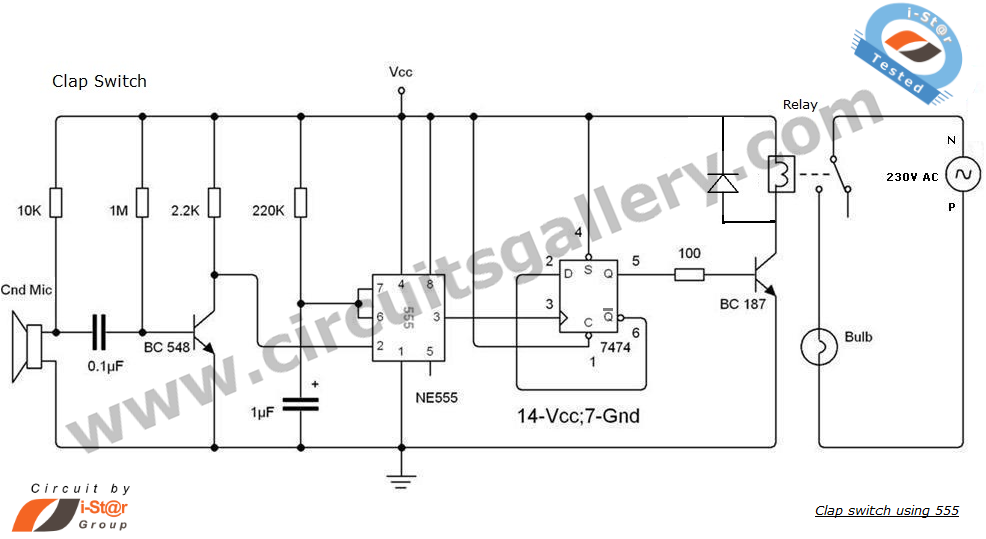
This is an intriguing 555 timer circuit designed to entertain and engage individuals while studying electronics in educational settings. Commonly referred to as a clap switch circuit, it operates as a sound-controlled flip-flop. This sound-controlled light can also function...
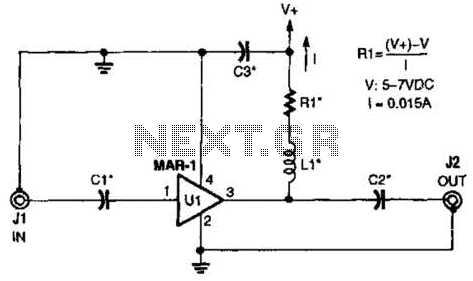
The low-cost Mini-Circuits MAR-X series of chips provides a significant advantage for RF builders, featuring inherent 50-ohm input and output impedances essential for RF systems. An MAR-1-based receiver/scanner preamplifier is illustrated. Capacitors Ci and C2 are chip capacitors, with...
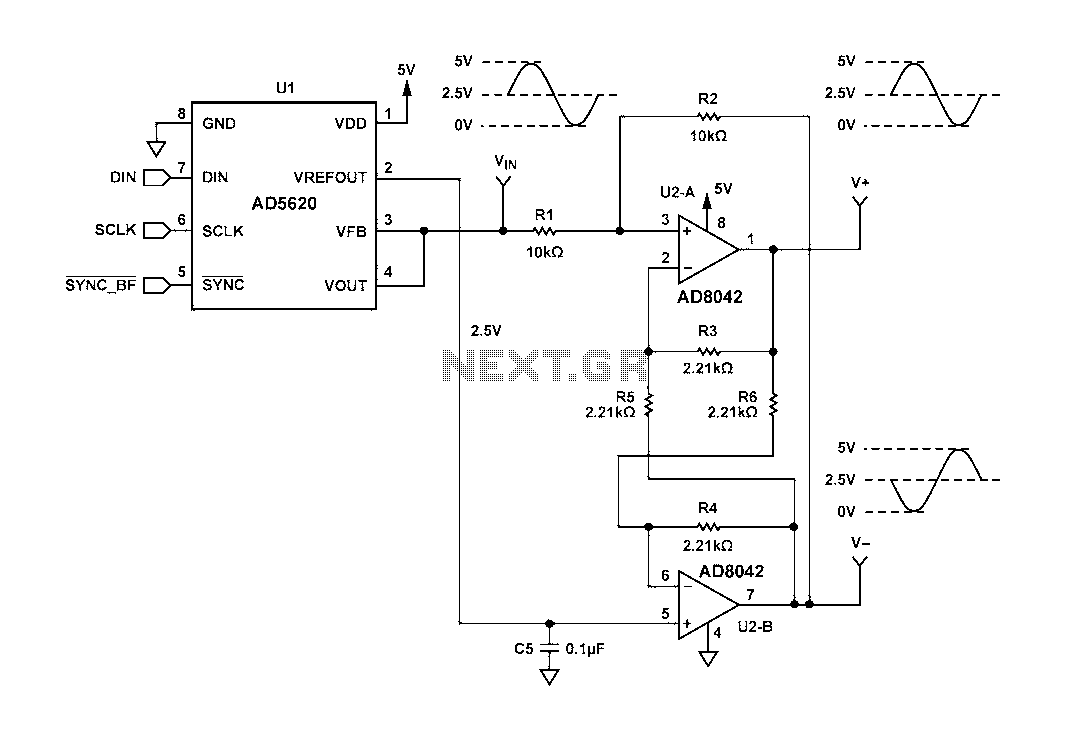
Figure 1 illustrates a circuit that utilizes a single +V power supply and a voltage output Digital-to-Analog Converter (DAC) known as the AD5620. The DAC is controlled via an SPI port, with its output ranging from 0 V to...
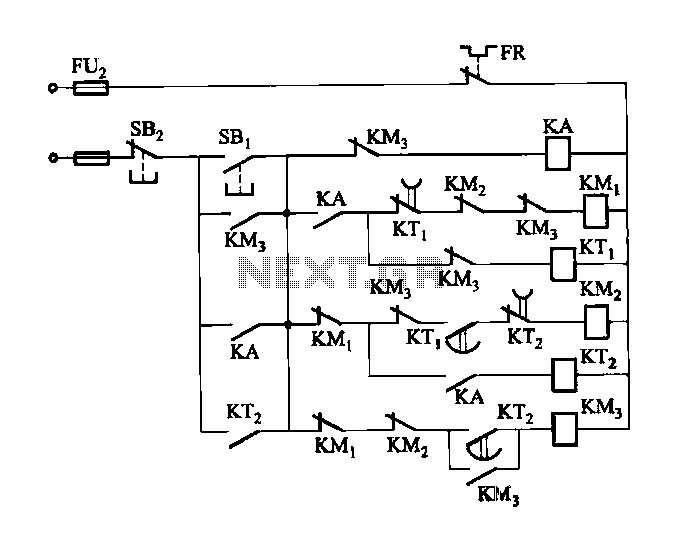
Figure 3-118 illustrates an automatic acceleration control circuit. This circuit employs a male contactor time relay, enabling the motor to start automatically at a low speed before transitioning to high-speed operation. The automatic acceleration control circuit depicted in Figure 3-118...