
Desktop Line Following Robot

The line following robot is a compact, autonomous vehicle designed to detect and follow a predefined path, typically marked by a contrasting line on the ground. This miniature version, reduced to less than one-fifth the size of standard models, employs several key components to achieve its functionality.
At the core of the robot is a microcontroller, which serves as the brain of the system. This microcontroller can be an Arduino Nano or similar, chosen for its small footprint and sufficient processing power to handle sensor inputs and motor controls. The robot is equipped with infrared (IR) sensors, typically two or more, positioned at the front to detect the line. These sensors emit IR light and measure the reflected light to determine whether the surface beneath them is light or dark, thus identifying the path.
The robot's movement is facilitated by two DC motors connected to wheels. The motors are controlled through a motor driver IC, such as the L298N, which allows for direction and speed control based on the microcontroller's signals. The motors are mounted on a lightweight chassis, which can be constructed from materials like plastic or thin plywood to maintain the robot's overall low weight.
Power for the robot is usually supplied by a small rechargeable lithium-polymer (LiPo) battery, which provides a good balance between size, weight, and capacity. A voltage regulator may be included to ensure that the microcontroller and motors receive the appropriate voltage levels for optimal performance.
The control algorithm for the robot is relatively simple, typically involving a basic proportional control loop. When the IR sensors detect that the robot is veering off the line, the microcontroller adjusts the motor speeds accordingly to steer the robot back onto the path. This feedback mechanism allows the robot to maintain a steady course along the line, competing effectively in speed against other participants in the contest.
In summary, this tiny line-following robot exemplifies the principles of robotics and automation, showcasing how compact design and efficient programming can yield a functional and entertaining device suitable for personal use and competition.Recently many kind of robot contests have being opened and some interesting reports of the challenge are found on the web. The Line Following is a kind of the robot contests to vie running speed on the line. I build a tiny line following robot which can run on the desk, moving the key board aside will do. It is for only a personal toy reduced its size less than one fifth compared to typical line following robots, not in formura.
🔗 External reference
Related Circuits
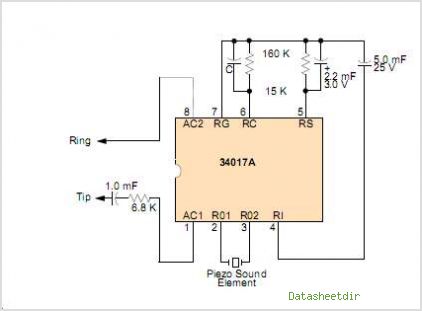
A while ago I got an email asking for the schematic of a circuit to detect cut phone lines. It didn’t take me long to find this circuit in Electronics Now. When the circuit detects that a phone line...

A basic CNC machine was built for a university project, and the completed machine will undergo upgrades over the coming months. The plan includes replacing the small 48-step stepper motors with larger 200-step motors to enhance performance. The project involves...
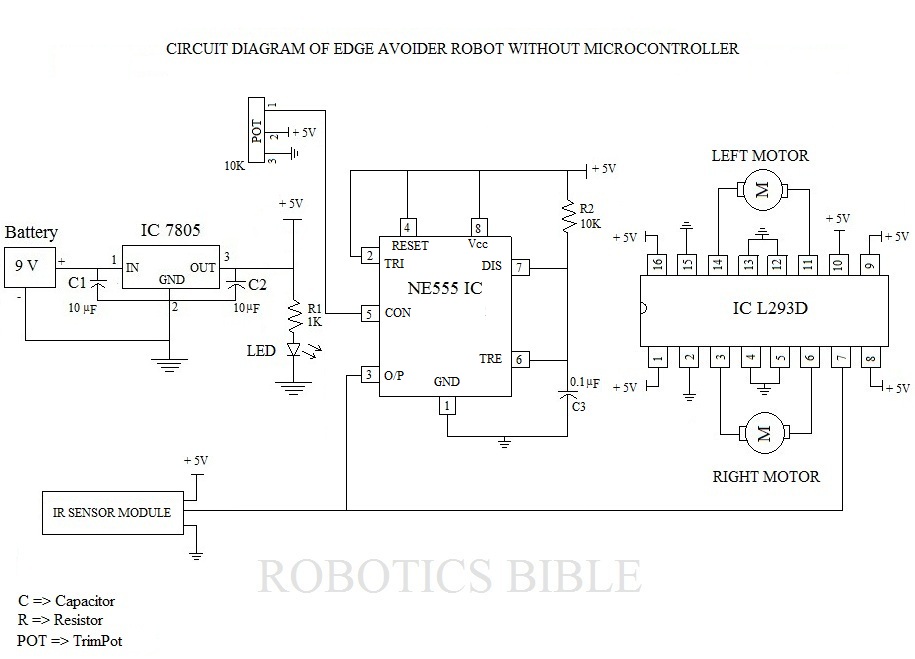
The Edge Avoider Robot (EAR) is a mobile device that detects and avoids areas where there is no surface beneath it. The Edge Avoider Robot (EAR) operates using a combination of sensors and microcontroller technology to navigate its environment effectively....
It is widely recognized that power-saving regulations necessitate very low power consumption during standby conditions for all equipment continuously connected to mains power. In the standard version of the power supply, standby power consumption is approximately 9.0 W for...
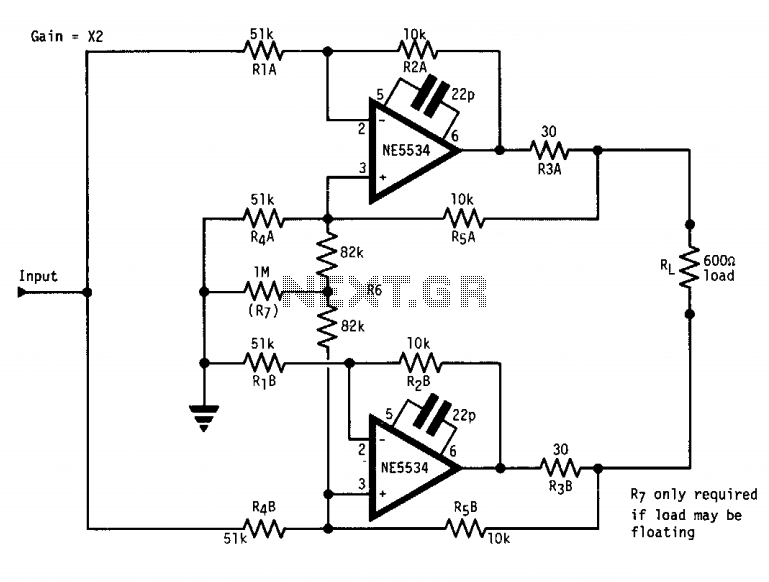
The circuit features a "floating" output, functioning similarly to an isolated transformer winding. The output amplitude remains constant regardless of whether the center or either end of the load is grounded. This is accomplished by ensuring that the output...
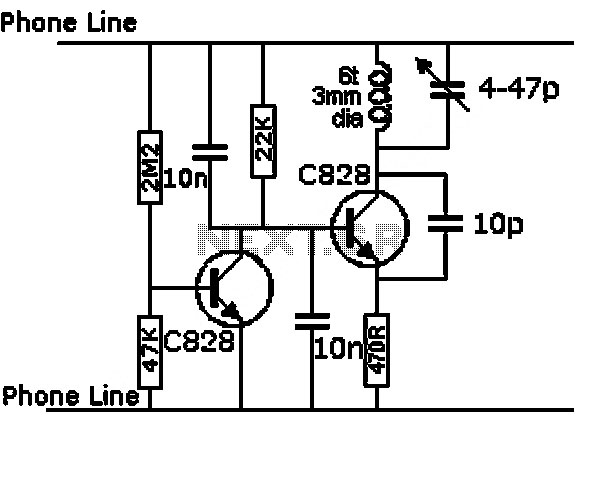
This design outlines a phone bug circuit. The wireless telephone line spy circuit is capable of transmitting phone conversations to a nearby FM radio. The circuit must be connected to a standard phone line. In the circuit, the first...