
PC Based Robot with AT89C2051

The described robot control system integrates a personal computer (PC) with a microcontroller, forming a robust architecture for managing sophisticated robotic applications. The PC serves as the primary processing unit, capable of executing complex algorithms and handling high-level tasks such as user interface management, data analysis, and real-time decision-making. The microcontroller, on the other hand, is responsible for interfacing with the robot's hardware components, including sensors, actuators, and communication modules.
The connection between the PC and the microcontroller can be established through various communication protocols such as USB, UART, or I2C, allowing for efficient data transfer and command execution. The microcontroller continuously collects data from the PC, which may include control commands, operational parameters, and feedback from the robot's sensors. This data is processed in real-time to ensure precise control of the robot's movements and functions.
Advanced control algorithms implemented within the microcontroller may include PID (Proportional-Integral-Derivative) controllers for maintaining specific performance metrics, as well as more sophisticated techniques like adaptive control or fuzzy logic to enhance the robot's responsiveness to dynamic environments. The system's design focuses on modularity and scalability, enabling the integration of additional sensors or actuators as required by specific applications.
In summary, this economical robot control system leverages the strengths of both a PC and a microcontroller to create a versatile platform capable of handling a wide range of robotic tasks. The combination of high-speed processing, advanced algorithms, and flexible hardware interfacing positions this system as a valuable solution in the field of robotics.The advent of new high-speed technology and the growing computer capacity provided realistic opportunity for new robot controls and realization of new methods of control theory. This technical improvement together with the need for high performance robots created faster, more accurate and more intelligent robots using new robots control devices, new drives and advanced control algorithms.
This project describes a new economical solution of robot control systems. The presented robot control system can be used for different sophisticated robot applications. The control system consists of a PC, a microcontroller that collects data from the PC 🔗 External reference
Related Circuits
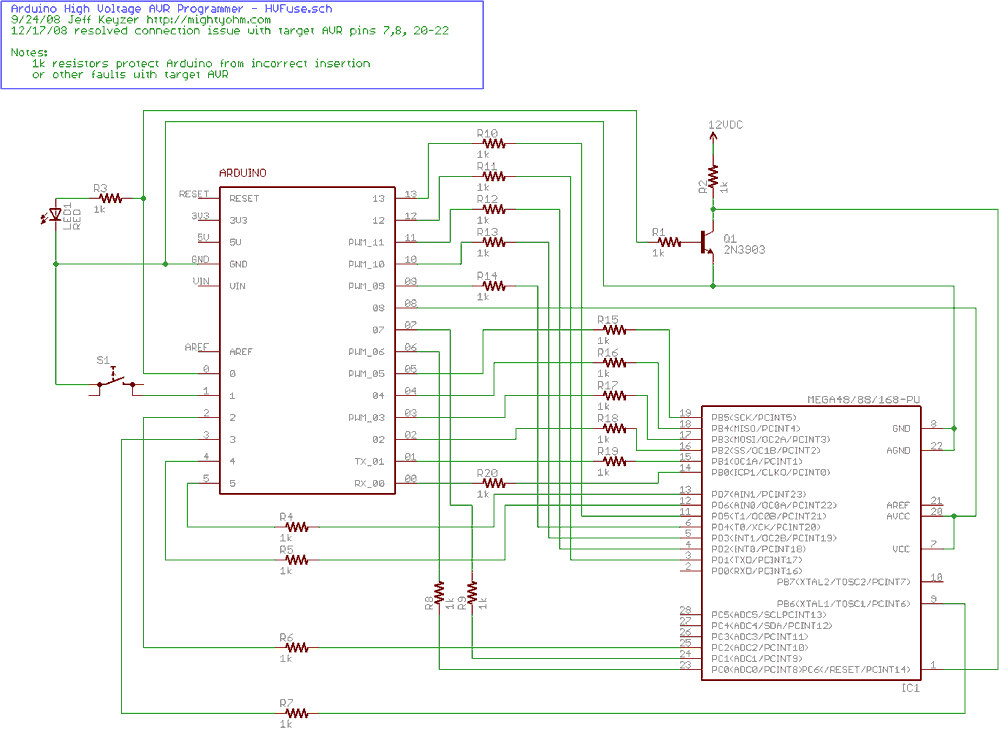
Fortunately, my trusty Arduino came to the rescue. I created an Arduino-based AVR programmer that uses the high voltage programming mode and can fix pesky fuses like RSTDISBL. The Arduino has just enough IO to implement the entire HV...
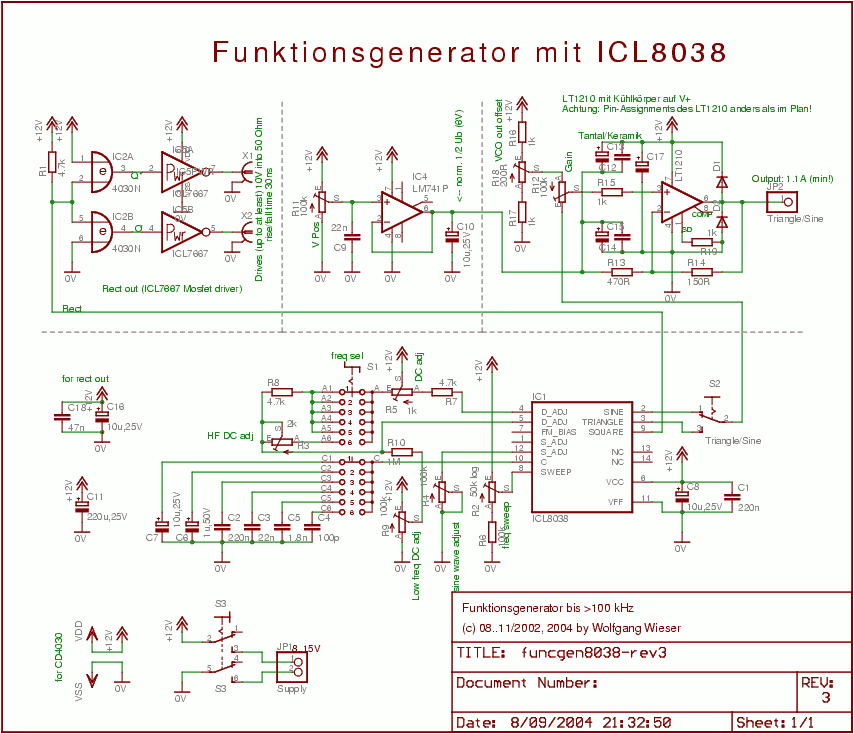
The circuit design is relatively straightforward. It features a Voltage Controlled Oscillator (VCO) utilizing the ICL8038 along with supplementary components, a sine and triangle output stage using the LT1210, and a CMOS-compatible output stage driven by the MOSFET driver...
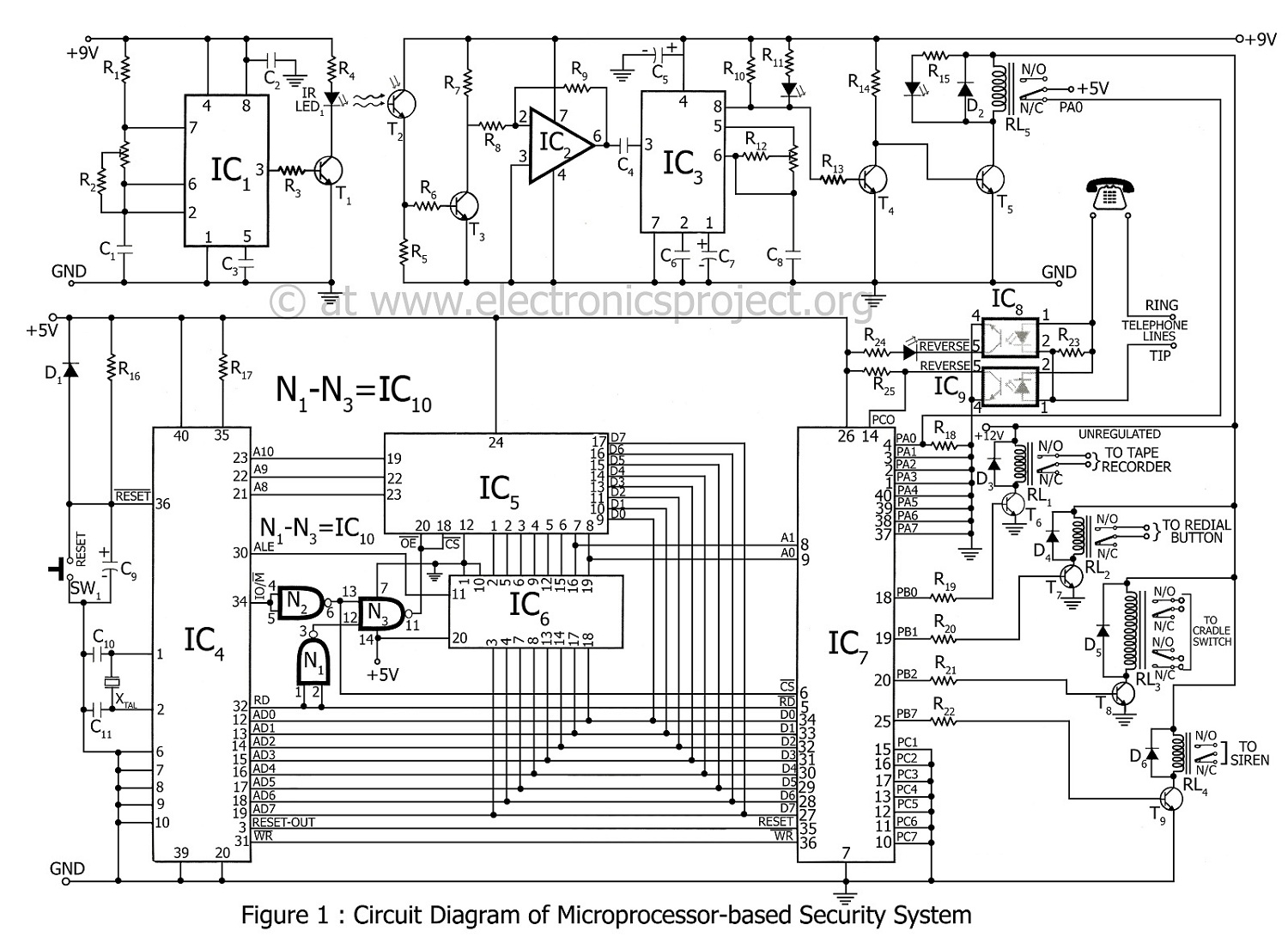
A microprocessor-based home security system project. This advanced security system not only notifies the user but also alerts the police immediately. In the 8085 microprocessor-based home security system, control is exercised over a siren, telephone (via cradle and redial...
To modify the servomotors, first remove the four screws securing the servo casing and disassemble it completely. Carefully extract the electronic components while retaining only the wiring. Modifying servomotors involves a systematic approach to disassembly and reconfiguration of the internal...
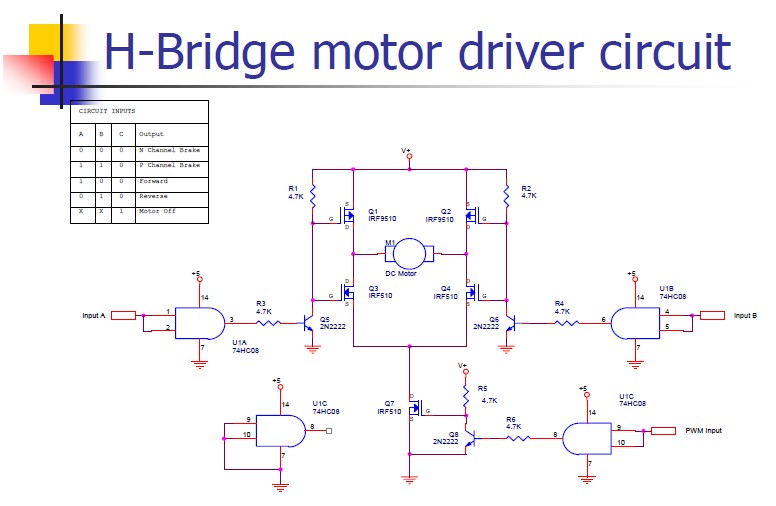
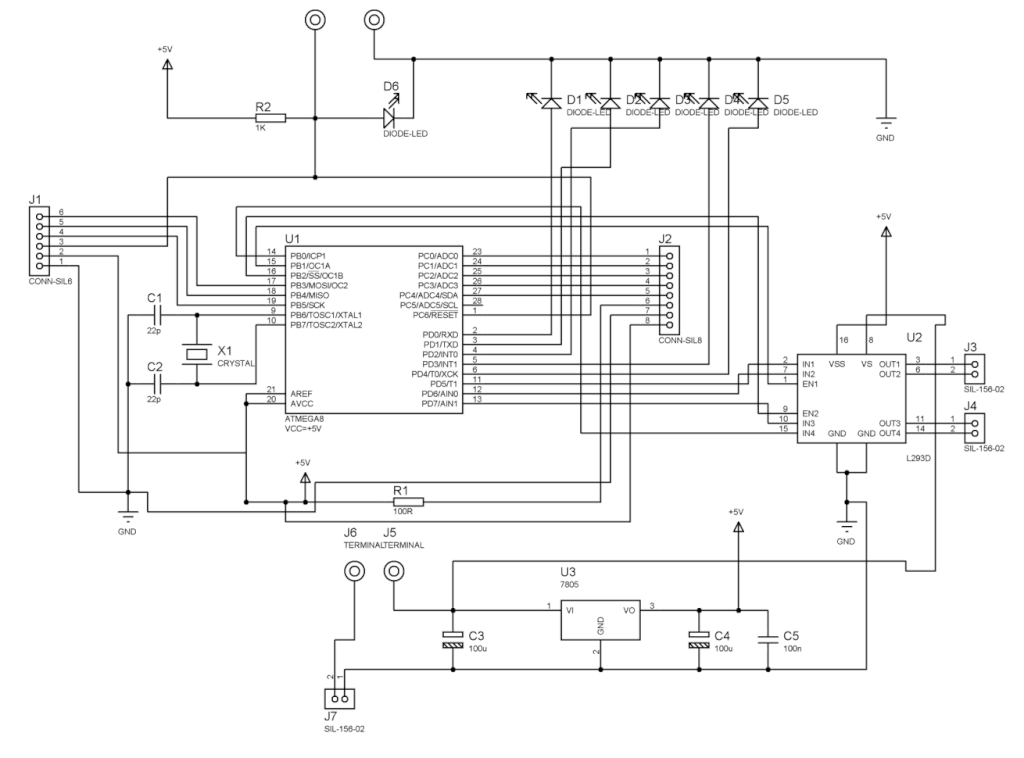
An H-bridge motor driver circuit is designed to control a DC motor. By using a low signal, such as a 5-volt signal, the circuit enables the program to manage the motor, which operates on a higher power supply. The H-bridge...
The three circuits were based on the vacuum tube ECC83, designed to produce phono preamplifiers in compliance with RIAA standards. The described circuits utilize the ECC83 vacuum tube, a dual-triode component known for its low noise and high gain characteristics,...