
Simple stepper motor controller

Alternately, a 2-bit UP/DOWN counter can also be used to control the direction, and a 555 multivibrator can be used to control the speed.
The circuit described is designed to drive a unipolar stepper motor with four coils, commonly found in devices such as printers and scanners. The configuration allows for precise control of the motor's rotation by energizing the coils in a specific sequence. Each coil is activated in a binary sequence (11, 10, 01, 00), which translates to the motor's stepping motion.
The SL100 transistor acts as a switch to control the current flowing through each coil. It is important to use appropriate heat sinks to dissipate the heat generated during operation, especially when the motor is driven at higher currents. For applications requiring more current, the 2N3055 power transistor can be utilized in a Darlington configuration to increase the current gain, allowing for efficient control of higher power levels.
Diodes are strategically placed across the coils to protect the transistors from voltage spikes caused by the inductive loads when the coils are switched off. This protection is critical in preventing damage to the transistors and ensuring reliable operation of the circuit.
The direction of the motor can be easily reversed by altering the sequence in which the coils are energized. This can be achieved through a simple control mechanism, such as a 2-bit UP/DOWN counter, which provides a straightforward method for determining the sequence of activation. Additionally, a 555 timer configured as a multivibrator can be integrated into the circuit to regulate the speed of the motor by adjusting the timing of the coil activation sequence. This combination of components allows for versatile control of the stepper motor, making it suitable for various applications in robotics and automation. The circuit shown above can be used to control a unipolar stepper motor which has FOUR coils (I've swiped it off an old fax machine). The above circuit can be for a motor current of up to about 500mA per winding with suitable heat sinks for the SL100.
For higher currents power transistors like 2N3055 can be used as darlington pair along with SL100. The diodes are used to protect the transistor from transients. To reverse the motor just reverse the above sequence viz. 11,10,01,00. Alternately a 2bit UP/DOWN counter can also be used to control the direction , and a 555 multi-vibrator can be used to control the speed. 🔗 External reference
Related Circuits

This device acts as a variable speed control for the heater blower in a car. It takes its power directly from the existing wiring and connects with just 2 wires. It will also work for any 12 volt device...
The circuit depicted in Figure 3-120 allows for the control of a motor with a capacity of less than the rated current of 5A by using an intermediate relay instead of a contactor. This circuit enables four forward running...
A 555 timer operating in astable mode generates driving pulses, while two 4518 dual BCD (binary coded decimal) counters provide square waves. A TL081 operational amplifier functions as an output buffer-amplifier. Potentiometers R1 and R2 are utilized to control...
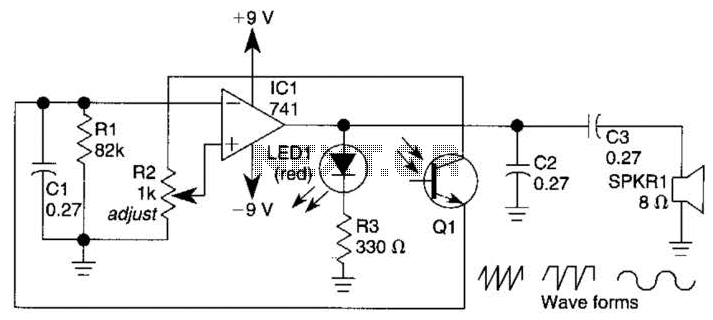
This is a range of IF signal circuits that may be of interest to radio hobbyists and professionals alike. Transistors T1 and T2 form an astable multivibrator oscillating in the audio frequency range of 1 to 2 kHz. An...
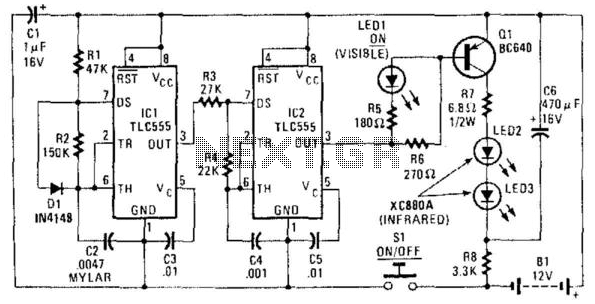
The transmitter is constructed using two CMOS 555 timer ICs (TLC 555s). It generates a modulated 35-kHz infrared signal. The carrier frequency of 35 kHz is produced by IC2, while IC1 generates a 1,500-Hz modulating signal. The output from...
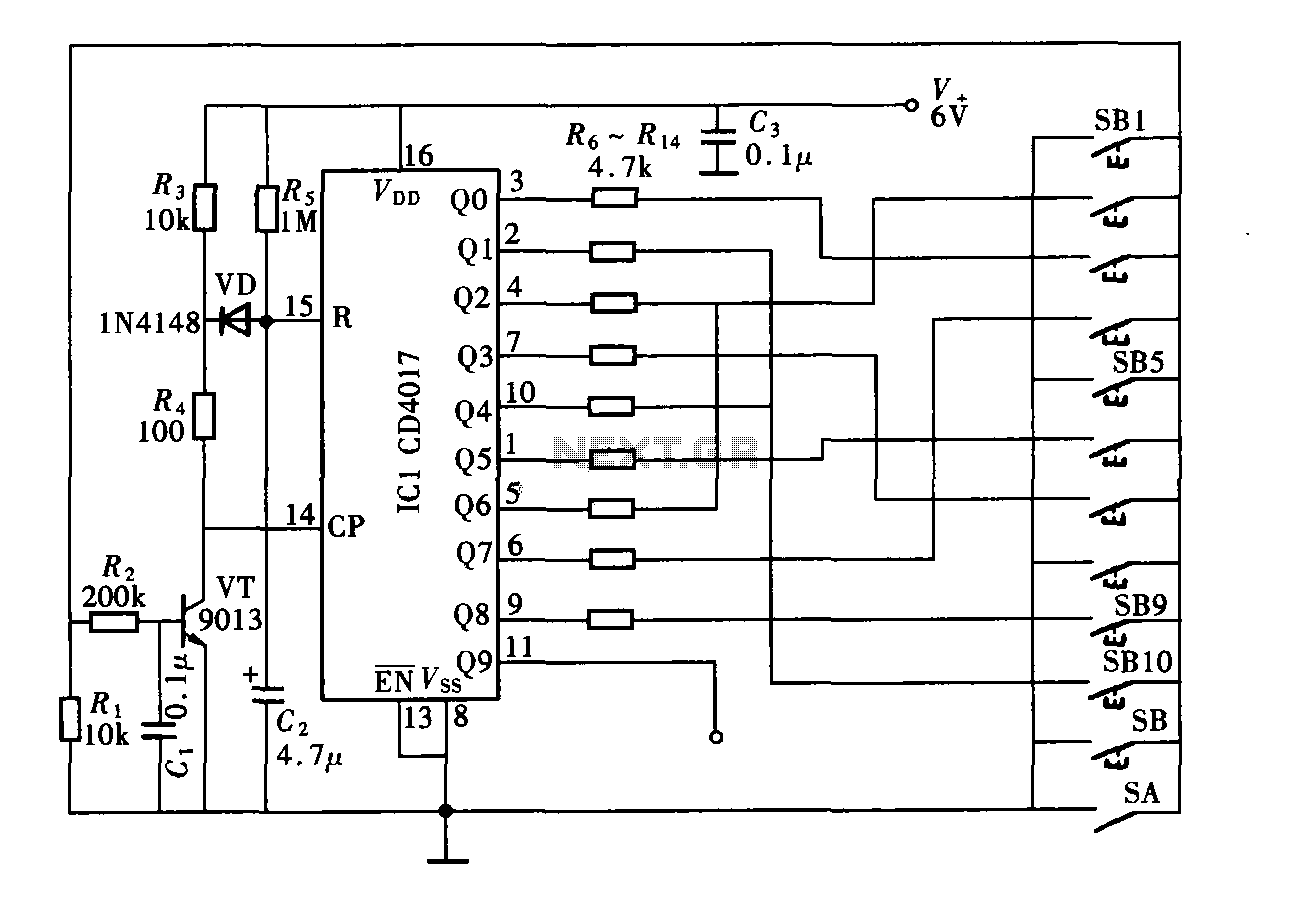
The digital controller features a nine-digit password system and includes a total of 11 keys. This comprises four pseudo-code keys and seven overlay keys, each of which has two valid key options. The total number of possible passwords is...