
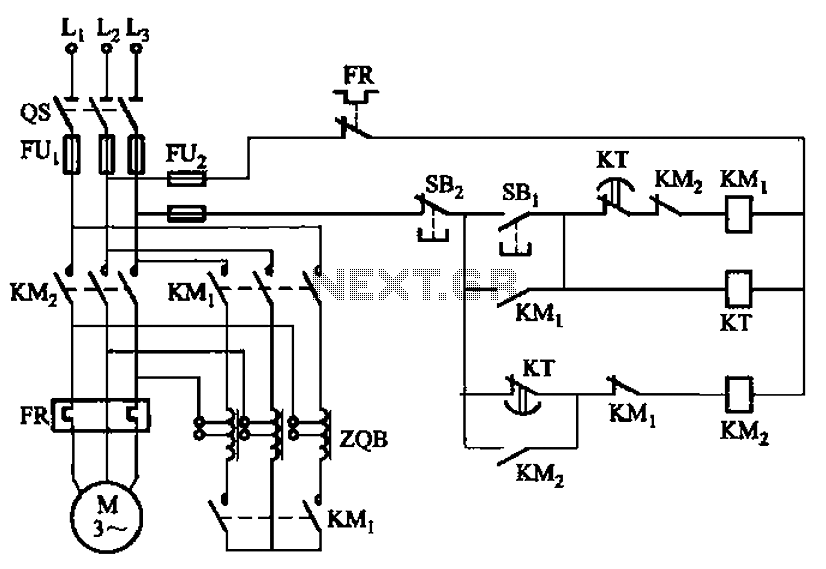
DC motor armature series resistance one way operation start dynamic braking circuit

The circuit design integrates several key components that contribute to its functionality. The starting resistance level is crucial for limiting the initial current during motor startup, preventing excessive inrush current that could damage the motor or associated circuitry. The undervoltage relay (KAz) serves as a protective mechanism, ensuring that the motor operates within safe voltage limits. When the startup resistor is removed, the relay activates, allowing the motor to run at its rated voltage.
During shutdown, dynamic braking is employed to quickly reduce the motor's speed. This is achieved by reversing the motor's field current, which generates a counter torque that decelerates the motor effectively. The dynamic braking feature is vital for applications requiring rapid stopping, enhancing safety and operational efficiency.
The second undervoltage relay (KAL) operates concurrently with the motor armature. It monitors the armature voltage, providing feedback on the motor's operational status. As the motor speed varies, KAL responds to changes in voltage, enabling precise control over the motor's speed. This feedback mechanism is essential for applications that demand variable speed control, allowing for adjustments based on load conditions or operational requirements.
Overall, the circuit exemplifies an effective design for motor control, combining starting resistance, undervoltage protection, and dynamic braking to achieve reliable and efficient operation. The integration of these elements ensures that the system can adapt to varying operational conditions while maintaining safety and performance standards. Circuit shown in Figure 3-196. The circuit has a resistance level start, under voltage relay KAz controlled by the startup resistor removed; shutdown, the use of dynamic brakin g. Undervoltage relay KAL, when KA2 coil operating in parallel with the motor armature, they reflect the motor armature voltage, speed changes. It can be said that the circuit is used to control the speed of change.
Related Circuits
The circuit depicted in Figure 3-49 illustrates an autotransformer that is controlled by a time relay (KT). The delay time set by the KT relay corresponds to the motor's startup duration. The circuit utilizes an autotransformer, which is a type...
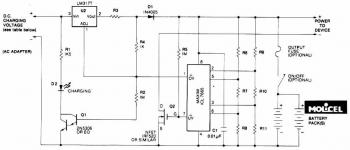
This circuit illustrates a Lithium Battery Charger circuit diagram. Charging is achieved using a constant current of 60 mA for AA cells until a cutoff voltage of 2.4V per cell is reached, at which point the charging process must...

Alarm interface circuitry featuring a two-color light-emitting diode (LED) display. When LAi is at a high level and LBi is low, the green LED lights up; conversely, if LAi is low and LBi is high, the red LED lights...
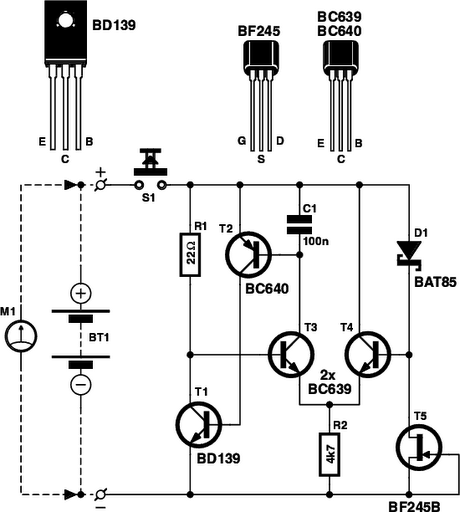
Is the battery empty, or is there something wrong with the device? This question can be challenging when a battery-powered device, such as a Walkman, appears to be non-functional upon switching it on. Before seeking professional servicing, the initial...
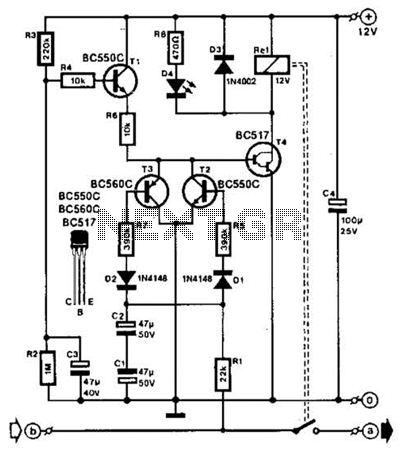
A speaker system can be safeguarded against amplifier failure by detecting DC voltages on the speaker line (a-b). The circuit is capable of sensing both positive and negative DC voltages. In such instances, a relay activates to disconnect the...
This simple circuit is started running by connecting a twelve volt battery across the terminals, causing the large diameter Light-Emitting Diode to light up. When the battery is removed, the LED stays lit up because the circuit has become...