
autonomous car obstacle avoidance

The circuit for the autonomous car's obstacle avoidance system utilizes an ultrasonic sensor, specifically the Parallax PING, which is connected to a servo motor to enable angular scanning of the environment. The servo motor is controlled by a microcontroller, typically an Arduino, which processes the distance measurements obtained from the ultrasonic sensor. The ultrasonic sensor emits sound waves and measures the time it takes for the echo to return, calculating the distance to the nearest obstacle.
The design incorporates a voltage divider to ensure that both the sensor and the servo are powered adequately from the RC car's battery, preventing power-related issues that could lead to erroneous readings or erratic behavior. The Arduino is programmed to initiate the servo's rotation, allowing the ultrasonic sensor to take a series of 36 distance measurements across a specified range of angles. This data is then analyzed to identify the closest obstacle-free path towards the next waypoint.
The system's effectiveness is enhanced by employing a threshold distance for obstacle detection, which is adjustable based on the desired safety margin. This threshold prevents the car from colliding with obstacles while still allowing it to navigate through available paths. The decision-making process is optimized by reducing unnecessary data output to the Serial Monitor and increasing the baud rate for faster communication, thus improving the responsiveness of the system.
Future enhancements may involve integrating stereo cameras for depth perception and employing advanced algorithms for edge detection and optical flow analysis, which will further refine the car's ability to navigate complex environments autonomously. These additions aim to improve the accuracy of obstacle detection and enhance the overall navigation capability of the autonomous vehicle.I need the car to avoid obstacles. This is a video of my autonomous car using ultrasonic sensor data to choose the nearest obstacle-free heading towards its destination. Basically, an ultrasonic sensor mounted on a servo takes distance measurements at a number of angles and chooses the obstacle-free angle
closest to that required to get to the next way point. After the car is up and running, I will experiment with adding stereo cameras and fiddle with edge detection algorithms, stereo vision (when images from the two cameras are compared, the parts with lots of differences tend to be closer while the parts with more similarities tend to be farther), and optical flow (while moving, the things that move faster tend to be closer and the things that move slower tend to be farther) I chose to use an ultrasonic proximity sensor. Specifically, I opted for a Parallax PING ( ). Here`s why I didn`t choose other sensor technologies: If the car only had a sensor measure distance directly in front of the car, it would have to avoid obstacles by guess and check it would drive until it sees an obstacle, back up, turn a little, and try again until it doesn`t see an obstacle.
This would take forever. With a 2-D representation of the space in front of it, the car can choose from a variety of directions. One option would be to buy a bunch of sensors and array them at different angles in front of the car, but it would be expensive to accomplish any respectable resolution with this approach.
A more attractive option would be to mount a sensor on a servo and collect readings while the sensor rotates. Fortunately, there is a kit for mounting the ultrasonic sensor on a servo ( ). However, this kit was designed for Parallax`s Boe Bot, not my RC car. So, I took off the front bumper of my RC car, machined a bracket for mounting the servo from an aluminium angle, and screwed the bracket into the holes where the bumper was.
One question to figure out is how many measurements I want the sensor to take in a single pass. If I take too many measurements, the pass will be slow and the car could crash while waiting for the sensor to complete its pass. If I take to few measurements, the car could fail to detect obstacles or available paths. I chose 36 measurements per pass, because it seemed to strike the balance between these extremes. I get a good resolution, but I am able to complete a pass in well under a second. Another balance that needs to be struck is choosing the distance below which the car classifies something as an obstacle.
If the distance is too short, the car could be unable to stop before crashing into something. If the distance is too far, the car could unnecessarily rule out viable paths. A wiring guide for the ultrasonic sensor suggests the sensor be powered by the Arduino ( ). The Arduino servo library also suggests that the servo be powered by the Arduino ( ). However, when I tried to power both devices using the Arduino, the sensor reported bad data and the servo misbehaved. To fix the issue, I ran both of the devices off of the RC car batteries, stepping the voltage down using a voltage divider.
Thanks to DuaneB from the Arduino forum ( ) for pointing out that inadequate power was the cause of the problem. One challenge I encountered while setting this up was that the car seemed to take forever at the end of each pass to decide where to go.
Two changes fixed this problem: I stopped displaying all of the measurements on the Serial Monitor sped up the Serial transfer rate from 9600 baud to 11520 baud. Thanks to dxw00d and Nick Gammon from the Arduino forum ( ) for these fixes. 🔗 External reference
Related Circuits
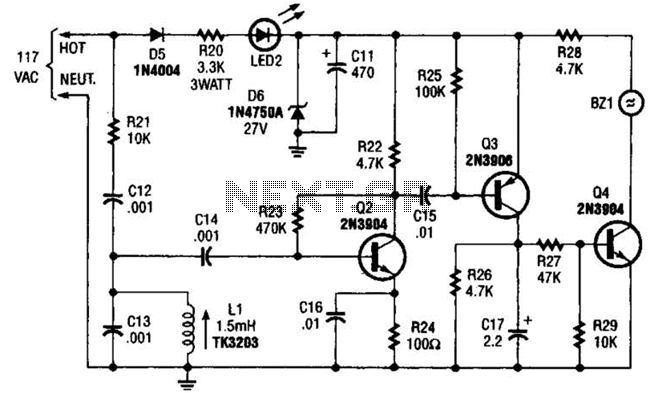
The baby-alert receiver consists of three transistors: Q2, configured as a high-gain linear amplifier; Q3, functioning as both an amplifier and detector; and Q4, which operates primarily as a switch. Additionally, there are several other components involved. The system...
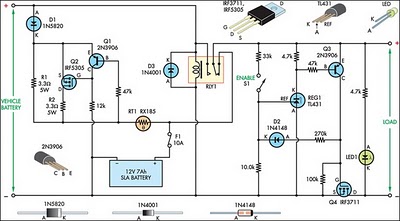
This circuit is designed to switch power to a Peltier cooler in a vehicle. Power is supplied to the load from the vehicle's battery when the ignition switch is on and from an SLA auxiliary battery when the ignition...
Camping today often requires carrying various electronic devices for daily activities and entertainment. Typically, a charged lead-acid battery and a power inverter are utilized to ensure a well-organized trip, allowing family members to use their electronic devices comfortably. It...
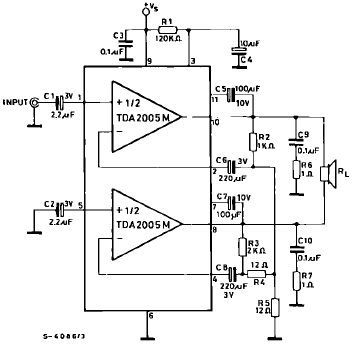
The TDA2005 is a Class B dual audio power amplifier package specifically designed for car radio applications. It facilitates the easy design of car radio power boosters. The TDA2005 power amplifier is engineered to deliver high-quality audio output in automotive...
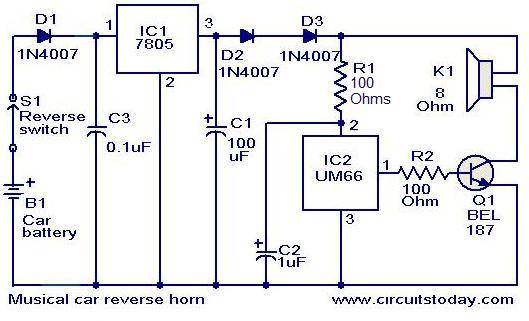
This circuit is designed to produce a musical horn whenever a car is in reverse gear. It utilizes two integrated circuits (ICs) for its operation: a voltage regulator (7805, referred to as IC1) and a musical tone generator (UM66,...
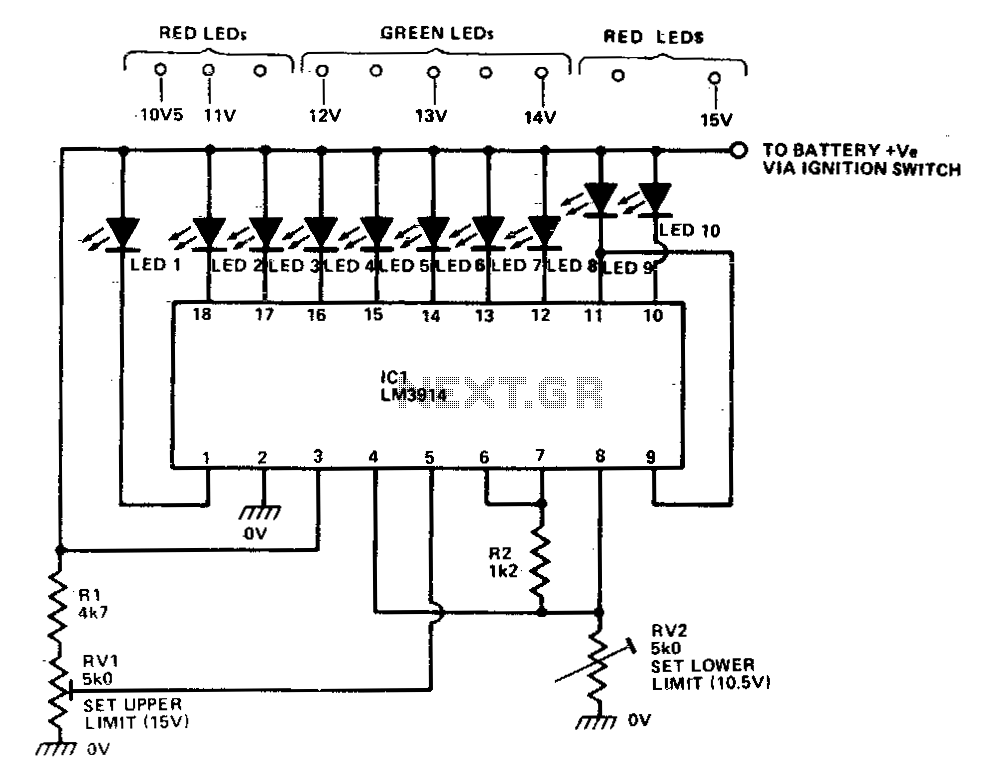
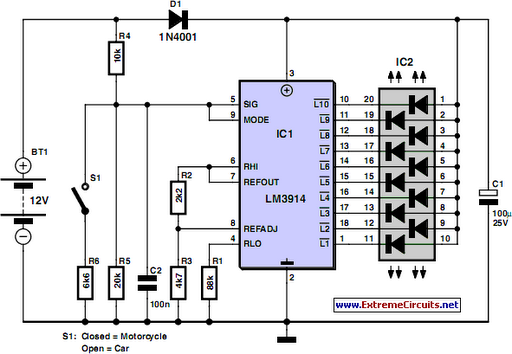
The LM39X4 functions as a LED-driving voltmeter, with its maximum and minimum readings determined by the resistor values R2 and RV2. When properly calibrated, the device operates within a 2-volt to 3-volt range but is designed to read supply...