
Human-Computer Interface Technology 3
The LassoBot and StruggleBot projects illustrate the challenges and creativity involved in developing robotic systems. The LassoBot's initial design aimed to create an interactive robot capable of capturing objects, but limitations of the DC motor led to a reevaluation of the approach. The StruggleBot emerged as an innovative solution, employing continuous motion to navigate its environment, thus demonstrating adaptability in design.
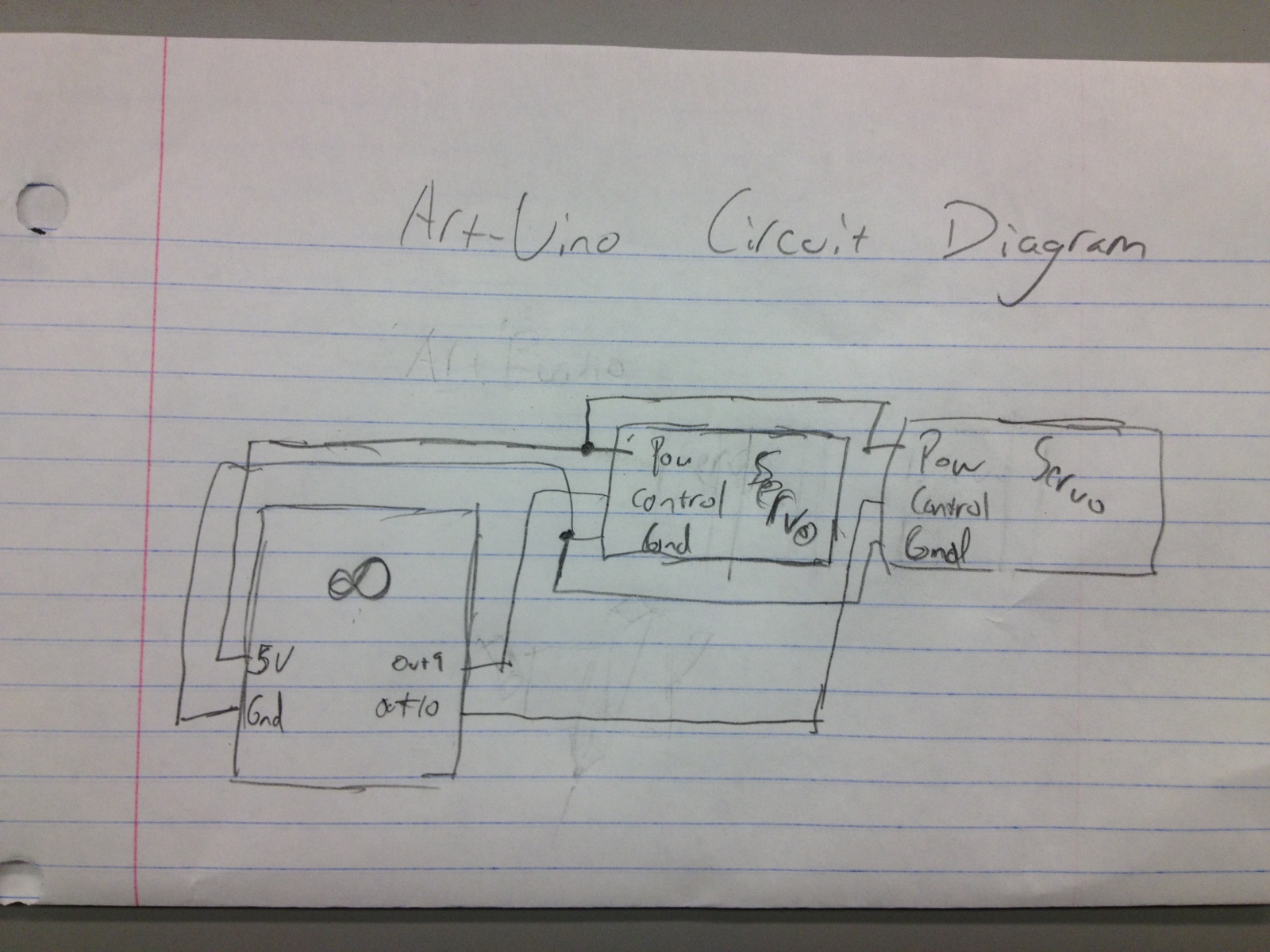
In the StruggleBot configuration, the core components include a motor for rotation, a lasso mechanism for movement, and a control system based on an Arduino microcontroller. The potentiometer regulates motor speed, allowing for fine-tuning of the robot's responsiveness. The inclusion of a Zener diode in the motor circuit serves to protect against voltage spikes, ensuring reliable operation. The mounting of the motor at a 45-degree angle enhances the robot's ability to maintain momentum while minimizing friction with the surface.
The use of ballpoint pen tips as legs exemplifies resourcefulness in engineering design, offering a lightweight and effective means of locomotion on smooth surfaces. This design choice not only reduces weight but also improves efficiency, allowing the robot to glide with minimal resistance. The transition from the initial concept of a window shade robot to the final design reflects the iterative nature of engineering, where prototypes evolve based on testing and practical constraints.
Future iterations of the StruggleBot could explore enhancements such as improved motor selection for better torque and reliability, or the integration of sensors to enable autonomous navigation based on environmental cues. The experiences gained from these projects contribute valuable insights into robotic design, control systems, and the importance of adaptability in engineering solutions.This week we were in a Southern mood in anticipation of Spring Break, so we initially decided to build a LassoBot. This robot throws a lasso in a circle until an object in the lasso`s path is grabbed on to. At that point, LassoBot reels itself closer to the object it caught. Late in development, we realized that making LassoBot hook itself onto st ationary was extraordinarily difficult given the weakness of the DC motor. At that point, we switched to building a StruggleBot that constantly rotates a lasso in an effort to move forward in a particular direction. The final product was a great success. The StruggleBot is amusing to watch, as it struggles, and it`s a creative means of locomotion. There were a few initial difficulties while creating our robot. Our initial plan to create a lasso bot did not work because the DC motors are too weak to reliably pull the robot along (although it did work in some cases).
Additionally, it was difficult to spin up the lasso without it tangling with itself. Other plans for the tumble weed robot fell through because we found that the Arduino is incapable of adequately powering four servo motors simultaneously as required. A robot that pulls itself up a table/wall by raveling a spool of rope hanging from a point like a cliffhanging robot even attach a person to make it look creative Tumbleweed bot.
Looks like a hamster wheel, but has servo motors attached around the edges to roll it forward. Alternatively, have a single servo motor and a counterweight at the center. 1. Set up the potentiometer element to control the rate of rotation of the motor. Connect pin 1 with +5V, pin 2 with A0 on the Arduino, and pin 3 to ground. 2. Set up the motor circuit. To pin 3 on the Arduino, connect a 330-ohm resistor, and connect this to the base on the transistor. Connect the emitter to ground. Connect the motor in parallel with a Zener diode, and connect both of these elements in series with the collector. 3. Mount the motor on the bottom of a circuit board using electrical tape, and use two jumpers in the circuit board to elevate the circuit board off of the ground, face down.
Make sure the motor is inclined at 45 degrees. For this lab we built a robot with four legs that pulls itself along a string. Its four legs are the tips of ballpoint pens, allowing for a smooth gliding motion on relatively frictionless surfaces. Our original inspiration for the robot came from an idea we had to build a robot that opened and closed window shades according to how much light was in a room.
This robot would move vertically rather than horizontally, doing so by using a motor to pull itselfture iterations of the other direction. In tot3; void setup() { pinMopresent in the (good) edidn`t really work ittic, although the randomness creates cool images.
First use electrical t 🔗 External reference
Related Circuits
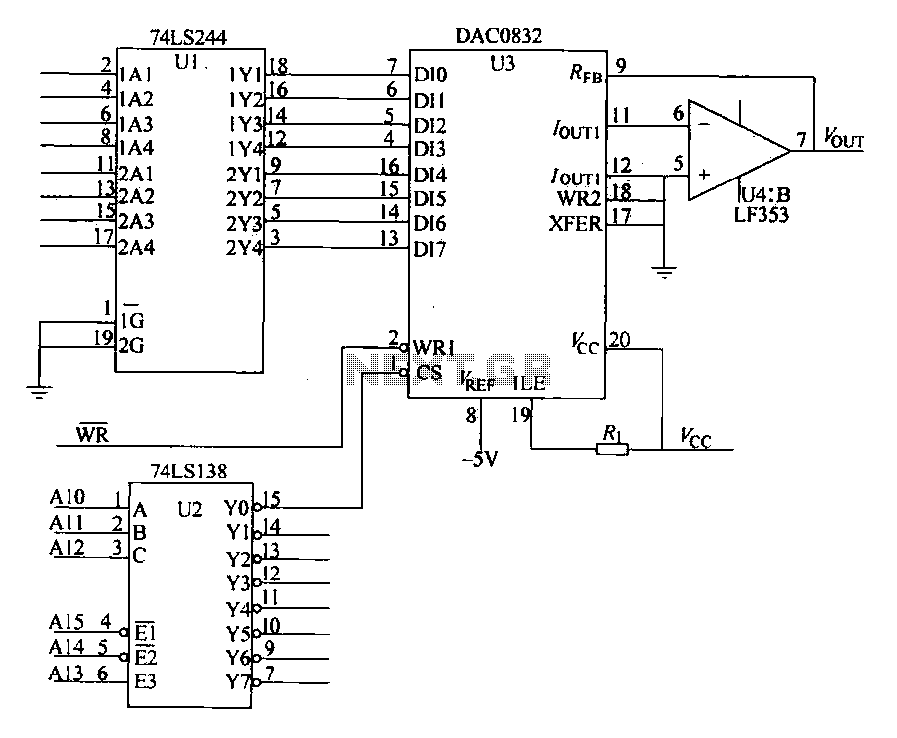
The DAC0832 is depicted in Figure 27-13 as a single-phase circuit connected to the 8086 CPU. The internal 8-bit data input of the DAC0832 must be interfaced with the CPU and the D/A converter interface circuits for data transmission,...
An electrician and businessman named Ton Kuiper has invented a circuit that is claimed to produce longitudinal waves, along with many effects similar to those of Nikola Tesla's technology, while being powered solely by a few nine-volt batteries. A...
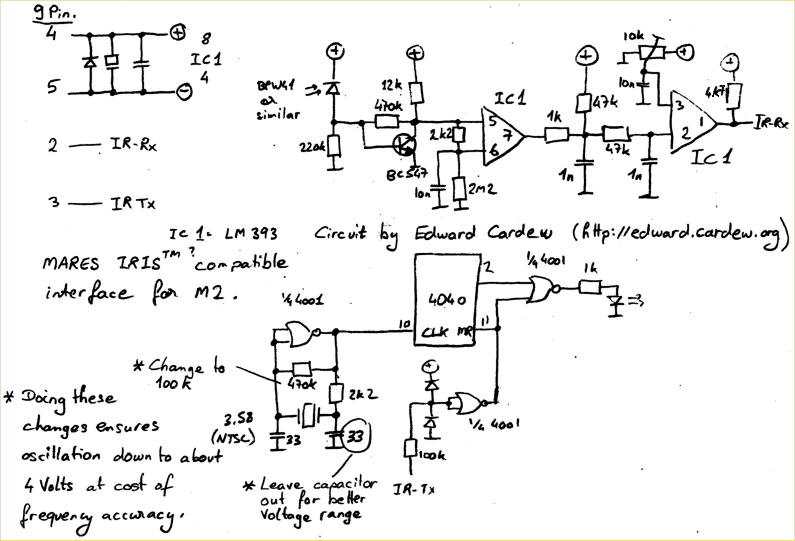
A TSOP4156 is often difficult to obtain or expensive to purchase. In response, an individual utilized old BPW41 infrared diodes to construct a custom receiver. The power source is derived from the RS232 port, requiring a minimum of 5.5...
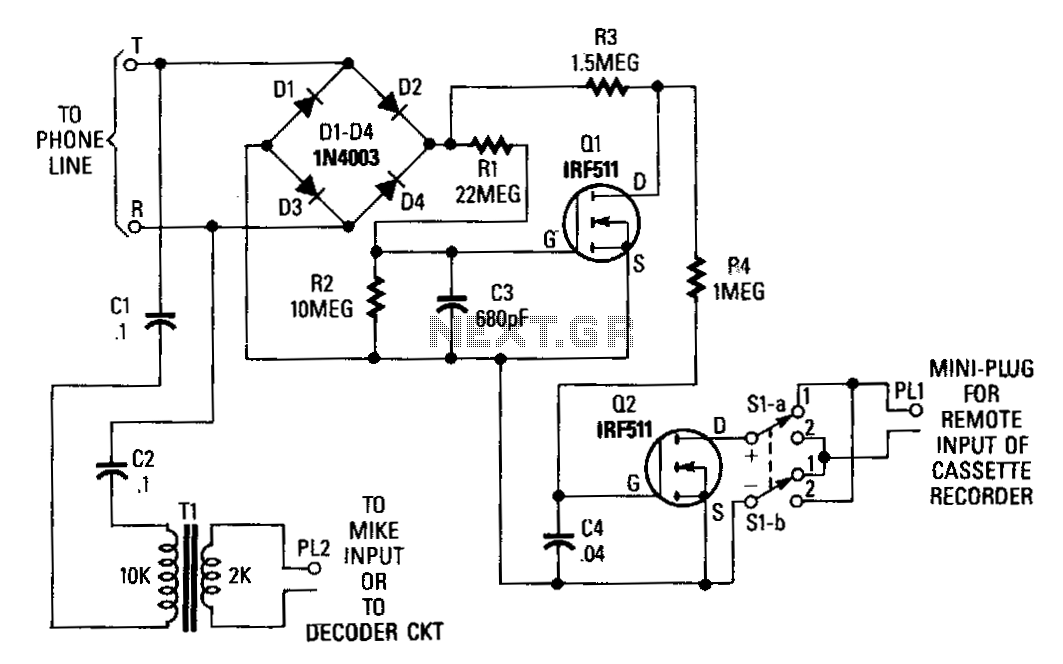
Q1 and Q2 form the foundation of an interface circuit that connects a cassette recorder to a telephone line. This circuit operates without an external power supply, drawing its power directly from the telephone line. The incoming signal is...
Many applications require a large number of keys connected to a computing system. Examples include PC keyboards, cell phone keypads, and calculators. Connecting a single key to a microcontroller unit (MCU) is straightforward; however, connecting 10 or 100 keys...
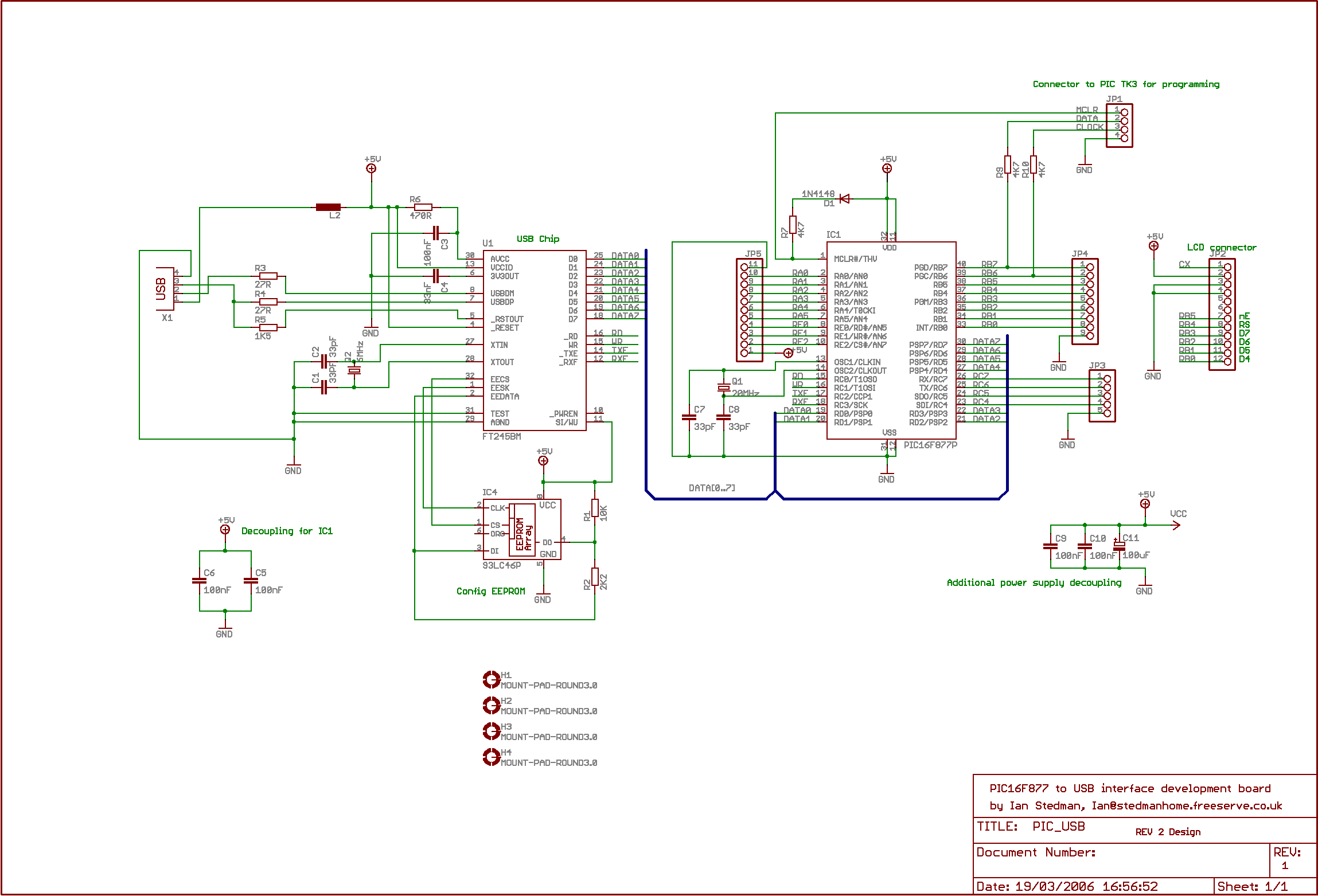
The second program sends "Hello world" to the PC. By default, the board utilizes the Virtual COM Port (VCP) driver, allowing output to be viewed using Hyperterminal or similar software; PuTTY is recommended. The setup is straightforward: upon connecting...