
Joystick Interfaces
The analogue interfaces designed for joysticks serve as essential components for controlling motor drivers, particularly in applications utilizing 4QD's motor controllers. These interfaces are engineered to convert joystick movements into electrical signals that correspond to speed and direction inputs required by the motor controllers. The typical operational range for the speed input is from 0 to 4 volts, allowing for precise control over the motor's velocity. The direction input, which is separate from the speed input, enables the user to dictate the rotational direction of the motor, facilitating forward and reverse operations.
The printed circuit boards (PCBs) available for these interfaces come in two forms: fully populated and tested, or bare boards. The fully populated boards are ready for immediate integration into systems, having undergone thorough testing to ensure reliability and performance. The bare boards provide flexibility for custom applications or modifications, allowing engineers to populate the boards with components as per specific project requirements.
The provided circuits are designed to accommodate various joystick types and can be adapted for different applications beyond joystick control, making them versatile in their use. The links to larger circuit diagrams allow users to access detailed schematics that can assist in the implementation of these interfaces into their systems. The index serves as a navigational tool, enabling efficient access to specific sections related to various interfacing options, circuit configurations, and additional resources associated with the analogue joystick interfaces.This is a page of analogue interfaces for joysticks. Although these interfaces have been developed for use with 4QD`s controllers they will have plenty of other uses. Also because of the development history, we have printed circuit boards available (either fully populated and tested) or bare boards) for these interfaces.
All of 4QD`s Motor Controllers require a speed input (typically 0-4 volts) and a separate direction input, so that is what these interfaces provide. Circuits are provided but as some of these are quite large, as links rather than as embedded GIFs. The index allows you to jump direct to the appropriate section. 🔗 External reference
Related Circuits
U1 is a Complex Interface Adapter (CIA). Both parallel ports are utilized to decode the keyswitches on the keyboard. Parallel port A signals (PA0 - PA7) function as outputs, while parallel port B signals (PB0 - PB7) serve as...
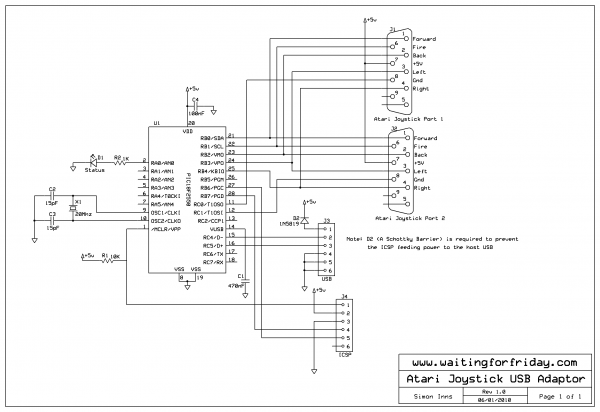
This project implements a composite USB device that supports two USB 2.0 full-speed gameport HID interfaces. The physical joystick ports are wired according to the Atari standard, allowing the connection of most Commodore 64 and Amiga joysticks, as well...

This joystick model was introduced by IBM alongside their first IBM PC computer. It is a basic analog joystick featuring two buttons. The original joystick interface included a circuit for connecting two joysticks but only had one joystick connector....

Some games are easier to play with digital joystick instead of analogue type. Unfortunately PC has only analogue joystick connector, which makes it impossible to connect normal digital joystick to it. But with a little adapter circuit, it is...
Building a custom joystick is particularly appealing to flight simulation enthusiasts who aim to create cockpit components that replicate the appearance and functionality of genuine aircraft parts. Such custom hardware requires a joystick controller tailored to the needs of...
The simplest solution for implementing joystick control for a robot is to program the actions in software on a microcontroller. However, many users prefer off-the-shelf components, thus this circuit is designed using diodes, resistors, transistors, and a FAN8200 motor...