
l293d interfacing with microcontroller

The circuit design for interfacing a DC motor with microcontrollers utilizes the L293D H-bridge, which allows for bidirectional control of the motor. The L293D is a dual H-bridge driver capable of controlling the direction and speed of two DC motors. It operates by receiving control signals from the microcontroller, which can be programmed to vary the duty cycle of the PWM signal. This modulation of the PWM signal effectively adjusts the average voltage supplied to the motor, thereby controlling its speed.
In addition to the L293D, a transistor-based H-bridge can also be employed for applications requiring higher current ratings or more robust control. This configuration typically consists of four transistors arranged in an H-bridge topology, allowing the current to flow in either direction through the motor based on the microcontroller's output signals.
The interfacing process with microcontrollers such as the 8051, AVR, or PIC involves connecting the control pins of the H-bridge to the respective GPIO pins of the microcontroller. The microcontroller is programmed to output PWM signals on these pins, which dictate the motor's speed and rotation direction. The PWM frequency can be adjusted according to the specific application requirements, ensuring smooth operation of the DC motor.
This setup is widely used in robotics and automation projects, where precise control of motor speed and direction is essential. Proper selection of components, including the H-bridge, microcontroller, and additional protective elements like diodes to prevent back EMF, is crucial for the reliability and efficiency of the circuit.DC motor interfacing with microcontroller with the help of L293D H-bridge and trasistor based H-bridge. DC motor speed control using PWM. Interfacing DC motor with 8051, AVR, PIC microcontroller.. 🔗 External reference
Related Circuits
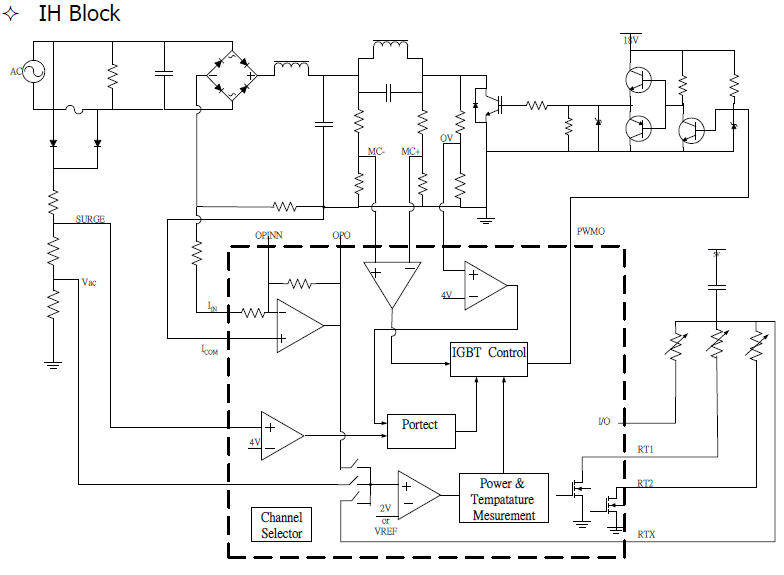
The control board features a 7-segment LED display for temperature and power readouts at the front. A fan is mounted at the base of the unit alongside an induction coil, which appears to use a similar gauge of Litz...
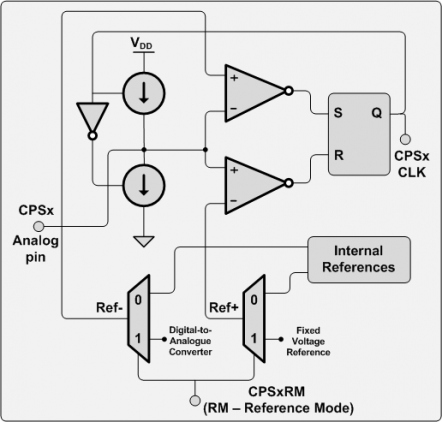
There are numerous applications for this hardware, including touch pads, proximity sensors, capacitive sensor readouts, high-precision capacitance measurements, ultra-small capacitance change detection, soil moisture sensing, and skin moisture measurement, among others. However, after searching for examples, it was surprising...
The Arduino Uno features an ATMEGA328P-PU microcontroller and various additional components on the board. The objective is to program the microcontroller without relying on the Arduino software, utilizing only the essential components. The goal is to develop projects independently...
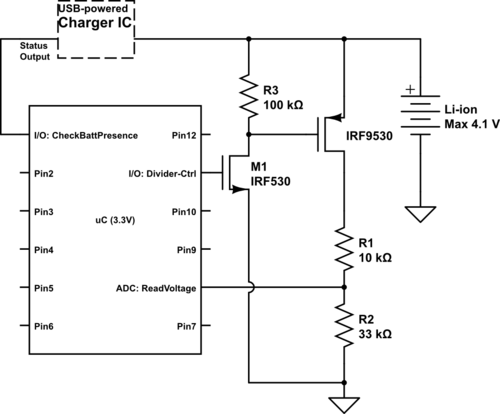
Currently using the PIC24FJ128GA010, there is a plan to utilize an Input/Output port to connect a 4.2 V LiPo battery and monitor the voltage to ensure it does not drop below 3.7 V. It is advised to avoid digital...

A mobile-controlled robot is a mobile device that offers extensive wireless control capabilities to the robot, as long as the cell phone remains within signal range. The mobile-controlled robot operates through a wireless communication interface, typically utilizing Bluetooth or Wi-Fi...
The anti-theft system includes two frequency sirens connected to the vehicle's immobilizer system. In the laboratory simulation model, the changes in operating modes, siren activation, and fuel supply cut-off are indicated by the illumination of LEDs and communicated to...