
large dancing robot using pic16f877a microcontroller
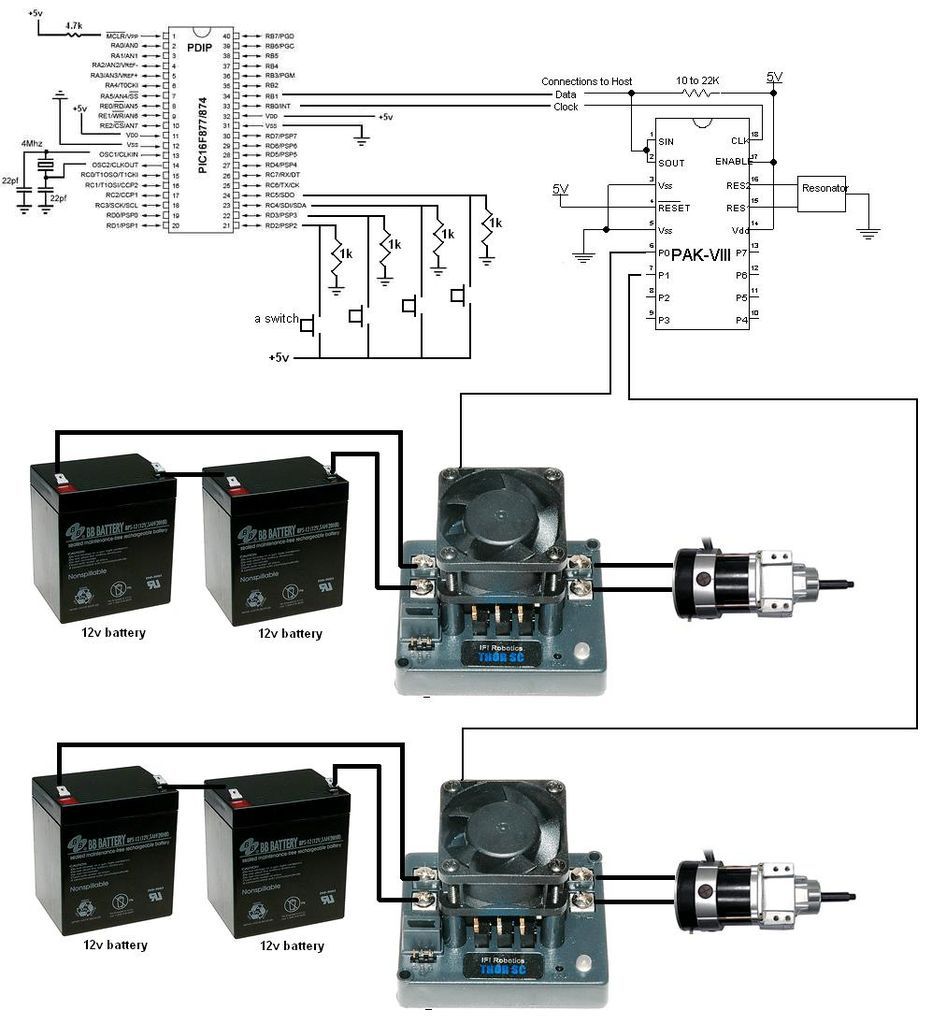
The project involves the construction of a large dancing robot, which, while initially designed for walking, exhibits a unique and entertaining rhythmic movement. The robot's structure typically includes a robust chassis, servos for movement, and a microcontroller to manage its operations.
The chassis can be constructed from lightweight materials such as aluminum or plastic to facilitate easy movement and reduce energy consumption. The design should incorporate a stable base to support the robot's height and ensure balance during its dancing motions.
Servos or stepper motors are essential components for achieving the desired movement. These actuators should be strategically placed at the joints to allow for a range of motion that simulates dancing. The choice of servo motors will depend on the weight of the robot and the complexity of the movements intended.
A microcontroller, such as an Arduino or Raspberry Pi, serves as the brain of the robot, controlling the servos based on programmed dance sequences. The programming can be done using a simple coding environment where different movements can be defined and sequenced to create a choreographed routine.
For enhanced interactivity, sensors such as accelerometers or gyroscopes can be incorporated to allow the robot to respond to external stimuli, such as music or audience movements. This feature can enhance the robot's performance, making it more engaging to viewers.
Power supply components, including batteries or a power adapter, must be chosen to ensure sufficient energy for prolonged operation. Careful consideration should be given to power management to prevent overheating and ensure continuous functionality during performances.
Finally, an optional feature could include LED lights or sound modules to further enrich the robot's dancing capabilities, providing visual and auditory feedback as it performs. This comprehensive approach ensures the creation of a dynamic and entertaining large dancing robot.Large Dancing Robot Build a large dancing robot. This was supposed to be a walking robot, but it more kinda beebopped around. video on last step. Build a P.. 🔗 External reference
Related Circuits
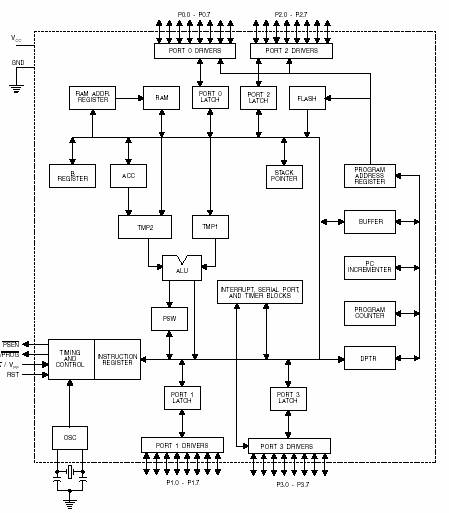
A microcontroller (MCU) is a compact computer integrated into a single circuit, comprising a relatively simple CPU along with supporting functions such as crystal oscillators, timers, sensors, and serial and analog input/output (I/O). Microcontrollers are designed for small-scale applications,...
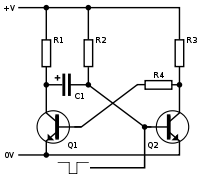
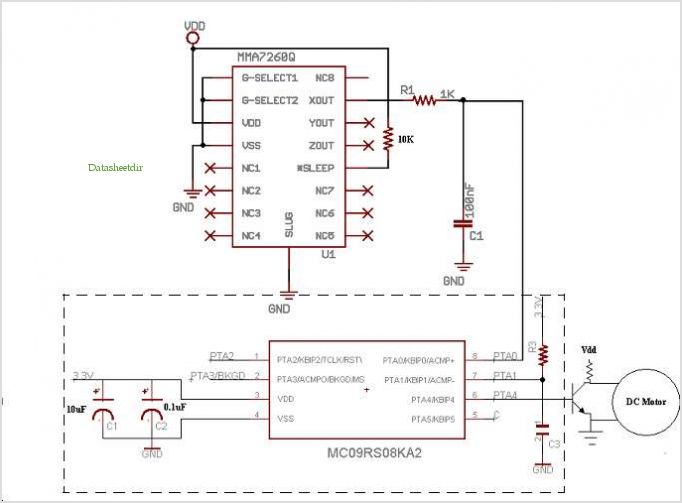
The microcontroller design features the microcontroller (MCU) in hibernation mode, which can only be awakened by a pulse (high-low-high) signal on the reset pin (active low). An accelerometer or an external real-time clock (RTC) serves as the wake-up source....
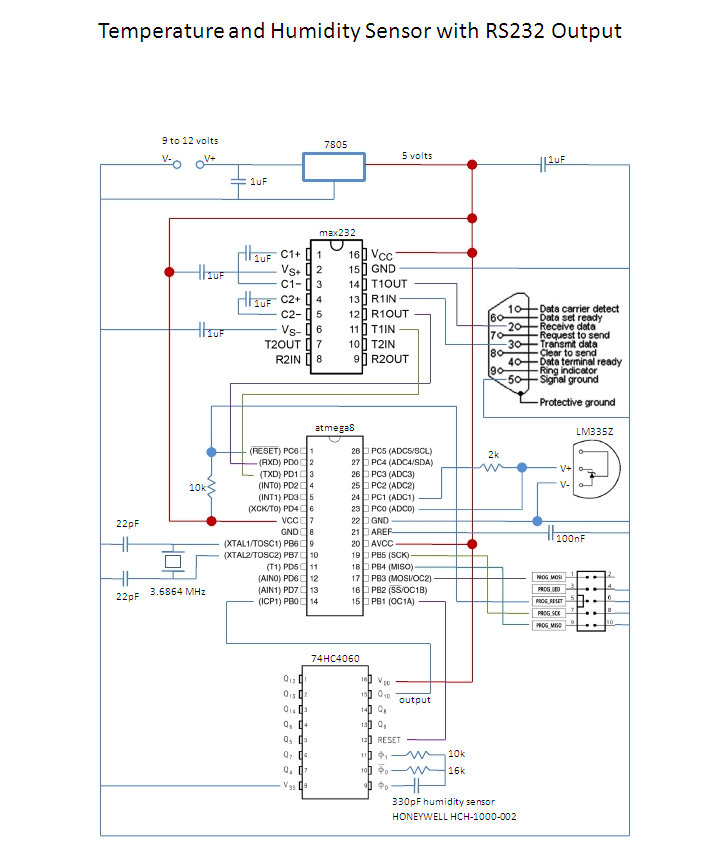
This is an affordable method for measuring temperature and humidity with a computer interface, designed as an entry-level project for high school students on a limited budget. The project involves the integration of a temperature and humidity sensor, such as...
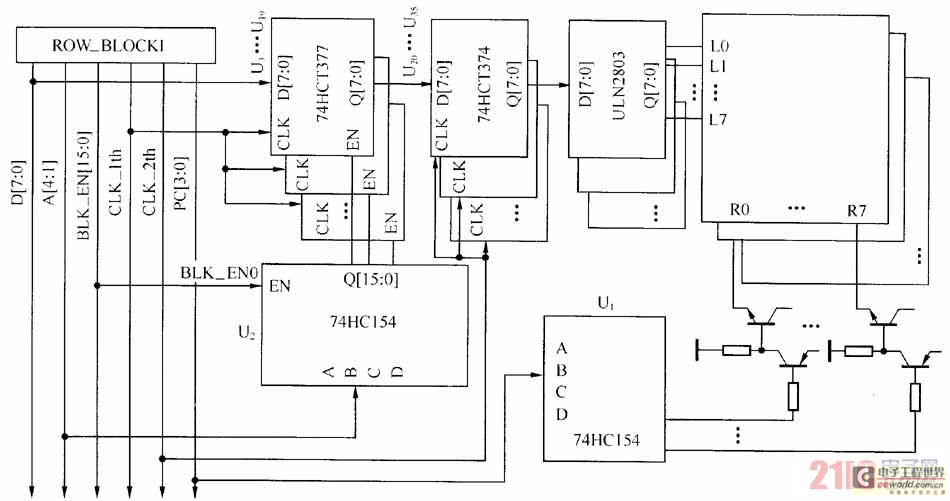
The large-scale LED display system utilizes a line-by-line scanning method and outlines the driving mechanisms to reduce hardware costs. It employs a 1/16 non-interlaced scanning mode, accommodating a total of 16 LED display panels. The schematic diagram of the...
The MIC2199 is a synchronous buck switching regulator controller. It features an all N-Channel synchronous architecture and powerful output drivers that enable a maximum output current capability of 20A. The device operates with an input voltage range of 4.5V...
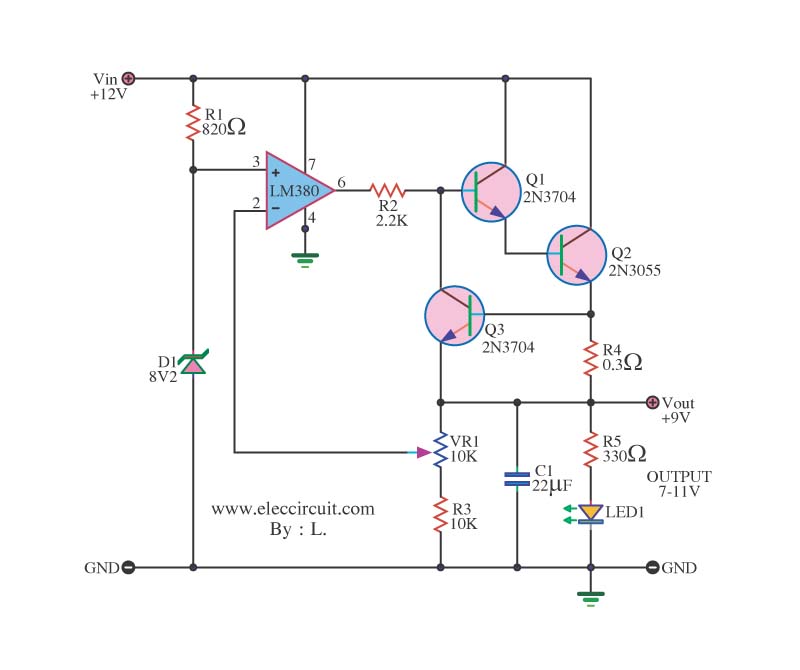
This circuit is designed to modify a power supply input of 12V from a battery or another source. It reduces the voltage level to a stable 9V at a current output of 2 Amps. The circuit utilizes a voltage regulator...