
LEGO robotics
The dual-RCX, six-motor robotic system is a sophisticated platform designed for various robotic applications, leveraging the LEGO MINDSTORMS technology. The system features two programmable RCX bricks, allowing for enhanced processing capabilities and communication between units. The serial interface protocol discussed provides a means for data exchange between the RCX and external devices, facilitating complex control and automation tasks.
The motors integrated into the system, specifically the 5225 Gear Motors, provide robust movement options. These motors are essential for driving the various robotic components, including the FetchBot's arm and grabber, which are designed to interact with objects in the environment. The arm's operation is driven by a single motor, which simplifies the design while maintaining functionality.
The Truck's architecture, featuring rack-and-pinion steering, allows for precise maneuvering and navigation. The integration of sensors enables the Truck to back up in a straight line, demonstrating the application of feedback mechanisms in robotic design. This capability is critical for tasks requiring spatial awareness and correction.
Communication between RCX units is facilitated by a low-level command structure, which allows for the transmission of simple messages. The retention of the last message received by the RCX enables decision-making processes, making the system adaptable to various scenarios.
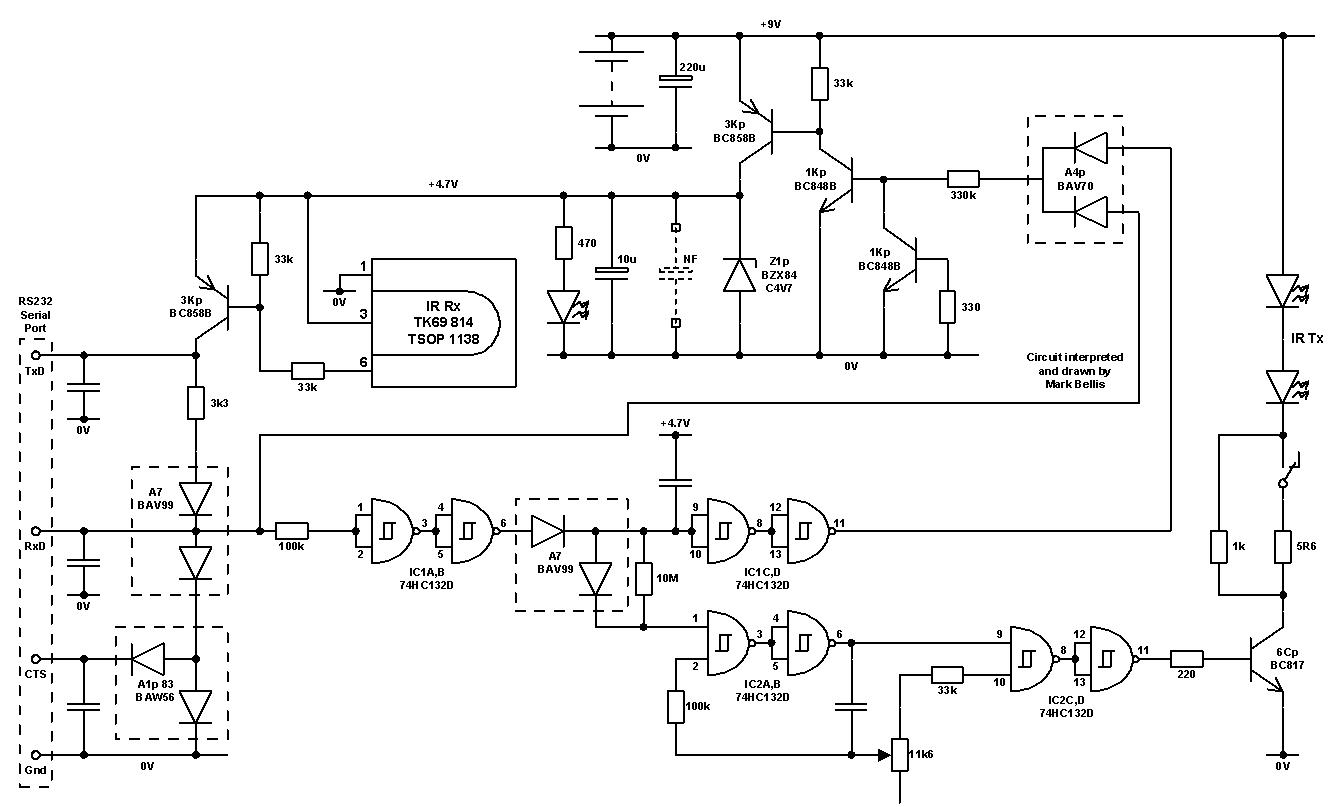
The exploration of infrared messaging by users like Rich Thompson has opened avenues for developing radar-like capabilities within the LEGO platform. This innovation showcases the potential for advanced sensing and navigation systems in robotic applications.
Overall, the dual-RCX, six-motor robotic system exemplifies the versatility and potential of LEGO MINDSTORMS technology, enabling users to create complex, interactive robotic systems that can perform a wide range of tasks. The collaborative contributions from various individuals in the community highlight the ongoing innovation and exploration within this field.A dual-RCX, six motor dog. Slashdot Review. Cindy Salwen pointed out a description of the protocol for the serial interface between the computer and the Dacta Control lab. This may or may not be related to the protocol used by the RCX, but if you`re reading this page, it`s probably interesting information anyway.
She also contributes another URL: National Instruments (LabVIEW) pages. Robolab is available for sale from Pitsco. Fred Martin, arguably the father of the RCX (well, given that LEGO redesigned the Programmable Brick from the ground up for production reasons, the *grand*father), has a page on LEGO MINDSTORMS. Kekoa Proudfoot says "toast that warranty!" He took apart his RCX and took some pictures of the inside of it.
He also looked up the numbers for some of the chips. Peter Ljungstrand bought a CyberMaster kit, disassembled the main unit, and took pictures. Dave Baum says that RCX to RCX communication is pretty simple. There`s a low level command in the RCX to send a message which contains a single 8 bit number as payload (plus the protocol "wrapper"). The RCX also remembers the last "message" it has seen, and this value can be used to make decisions. Pretty basic stuff, but still enough to do some reasonable things. Dave also talks about the various LEGO motors. The motors that come with MS are the 5225 Gear Motor. Such motors may be purchased at LEGO Shop at Home. Philippe Hurbain has compared Lego 9 volt motors. Jim Studt built a public Magic 8 Ball. Enter your question and press the Ask button, and you see a video of an RCX spinning the 8 ball, along with the final answer that floats to the top.
Doug Carlson has a four-wheel synchro robot which can move in any direction. He uses two angle sensors (available from Pitsco/Dacta), and can make it move in a perfect square. Alex Wetmore built a robotic platform using the plans for the adder/subtracter found on Leo`s LEGO. The platform allows you the robot to get the normal four motions (forward, reverse, spin left, spin right) with a perfectly straight forward and reverse. One of the motors is used to move the robot forward and backwards. To turn the robot left and right you use the other motor. The FetchBot searches for dark objects to grab, lift and deposit elsewhere. The grabber and the arm are driven by one motor. The page includes an animation of the arm grabbing a block, and photos of the gearing and cams that make it work.
The Truck is a robotic tractor-trailer vehicle with rack-and-pinion steering. The tractor contains sensors and the steering and drive motors, while the trailer carries the RCX controller and an earthmover. The Truck can back up in a straight line by using the sensors to determine if the trailer is off centre.
BTW, he got some fun feedback from The Probe robot that he posted earlier, including mail from someone who works for Digital Instruments. Apparently they hold the patent on the technique that his robot uses, they just do it on a somewhat finer (nano) scale.
Sounds like a theme for a competition: how many patents can you infringe using LEGO :) Rich Thompson has been playing around with the "radar" created by using IR messages and has posted some pics and code examples (in BotCode since the C skills are rusty, and BotCode feels more like assembly. ). Simen Svale Skogsrud built a LEGO-scanner. He also put in descriptions and code examples for proximity-detection and using the FOS-light unit as a rotation sensor.
Be welcome. No actual pictures of LEGO creations yet, but lots of attractive illustrations. David Mattison has done some work on improving the IR Radar capabilities, and he`s also designed a robot similar to Ben Williamson`s probe, but scann 🔗 External reference
Related Circuits
The 1-megohm resistor protects the FET from potential damage caused by accidental sparks to its gate lead. The circuit functions adequately without this resistor; however, it is advised not to intentionally apply a charge to the gate wire using...
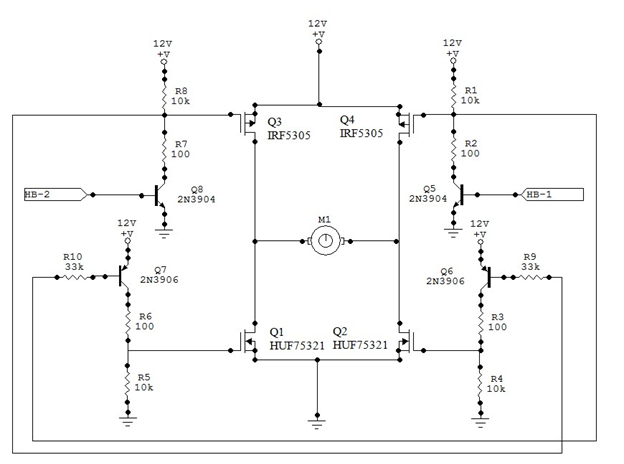
The principles of DC motors are discussed in the beginner and intermediate sections of this tutorial. This section will address the electronics required to interface them with a Basic X microcontroller or other digital chips. The simplest method of...
A control system is required using a standard PIC microcontroller for managing a LEGO light sensor. Guidance on the implementation process is needed. To control a LEGO light sensor with a standard PIC microcontroller, several key components and steps must...
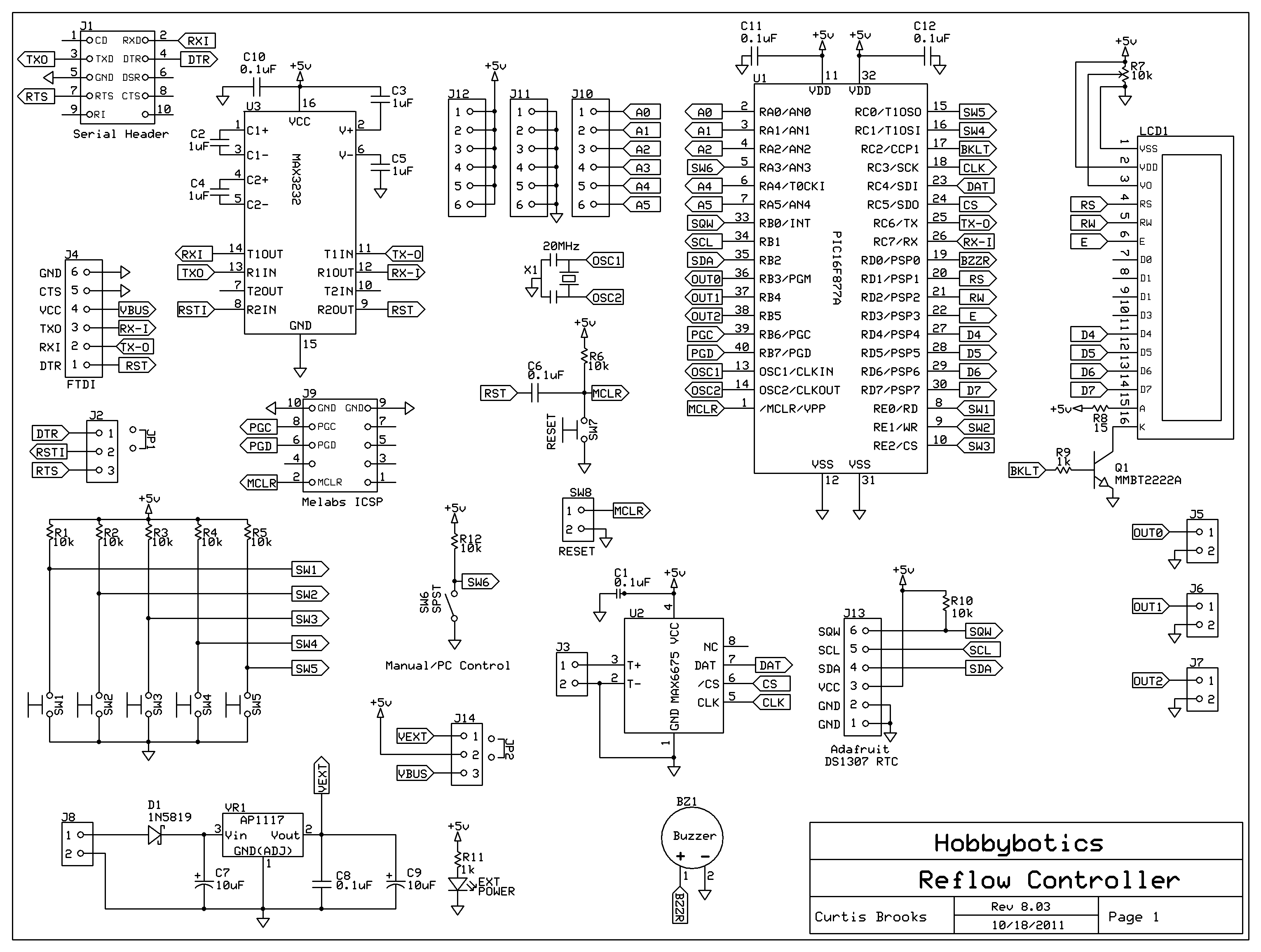
Introduction to the Reflow Process and PID Controller Circuit Documentation. This document discusses the benefits of using Surface Mount Devices (SMD) in circuit design, highlighting advantages such as reduced size and cost compared to traditional through-hole components. The reflow soldering...
The TINAH board shield is a printed circuit board designed for the Phys253 course, first utilized in 2009 by Engineering Physics students and faculty. This shield functions as a buffer to protect the digital and analog inputs and outputs...
One interface that is missing in the Lego MindStorms system is an electronic ear. This does not imply that the RCX should respond to spoken commands, which would require extensive electronics and software. Instead, it would be beneficial if...