
LINUSBot - Line Follower Robot using Arduino
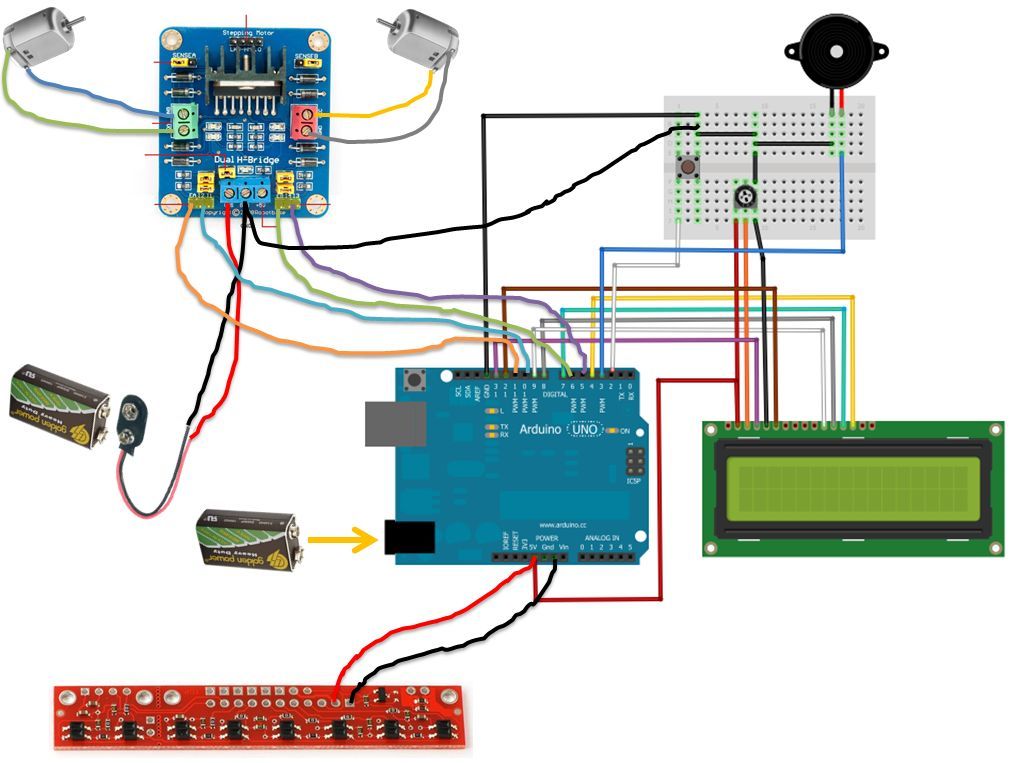
The robot's navigation system utilizes the QTRx8RC infrared sensor array to detect the presence of a black line on the ground. The sensors function by emitting infrared light and measuring the reflected light to distinguish between the black line and the white surface. When the robot is aligned with the black line, the sensors will register high reflectance from the black surface, allowing the robot to proceed forward without corrective action.
When the robot deviates from the black line and encounters a white area, the sensors will detect a significant drop in reflectance. The robot's control algorithm then analyzes the readings from the sensors to determine the direction of corrective action required. If the sensors on one side (e.g., left) detect a white surface while those on the other side (e.g., right) still detect black, the robot will steer towards the side with the higher reflectance to realign itself with the black line.
The QTRx8RC sensor array consists of eight individual sensors, but in this application, only five sensors are actively used, specifically the QRE1113GR models. This selection allows for a compact design while maintaining effective line detection capabilities. The digital output of these sensors simplifies integration with microcontrollers, enabling rapid processing of sensor data. The Pololu library provides pre-written functions to facilitate sensor management, allowing for straightforward implementation of line-following algorithms.
The overall design ensures that the robot can navigate effectively along predefined paths, making it suitable for various applications, including educational projects, automated delivery systems, and robotic competitions. The combination of reliable sensor technology and efficient control algorithms contributes to the robot's ability to maintain its course with minimal deviation.In case the robot being on the black line, it will always go ahead, and in the case of out of line and fall into a white area, it will determine whether to correct to the left or right, and thus remain on the black line. The sensors that will be used is the array infrared sensor Pololu (also called reflectance sensors) QTRx8RC, that consists of ei
ght sensors (only five are used) QRE1113GR. This array has a digital output and can easily be managed using the appropriate library of Pololu, for determine the position of the line relative to the sensors. 🔗 External reference
Related Circuits
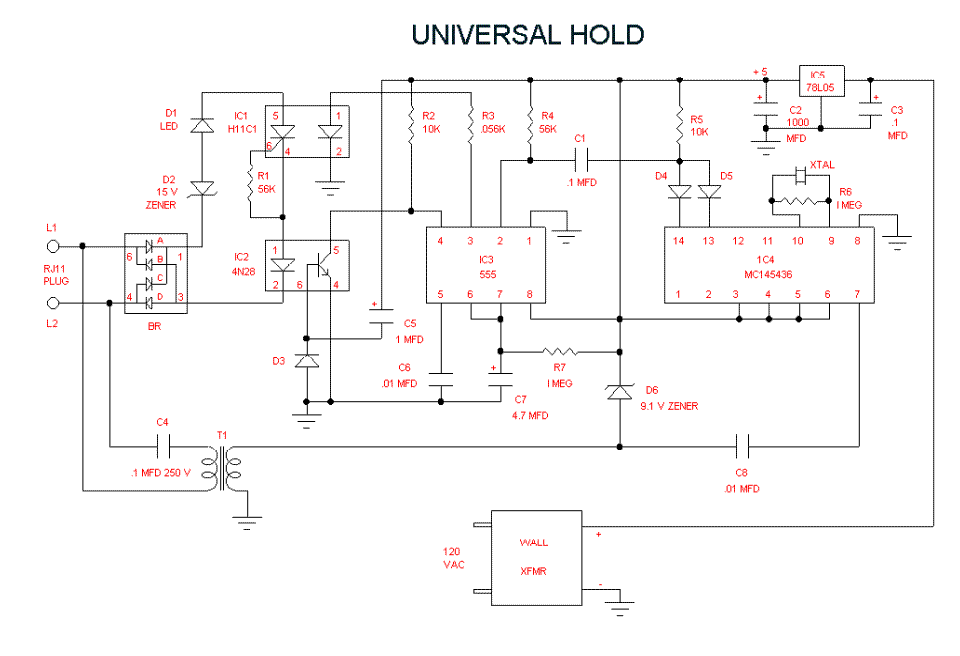
The UNIVERSAL HOLD circuit detects the dual tone, multi frequency (DTMF) tone that is generated when the # key is pressed and then activates a circuit that partially loads the telephone line so that the central office thinks a...
Many a times one needs an extra telephone ringer in an adjoining room to know if there is an incoming call. For example, if the telephone is installed in the drawing room you may need an extra ringer in...
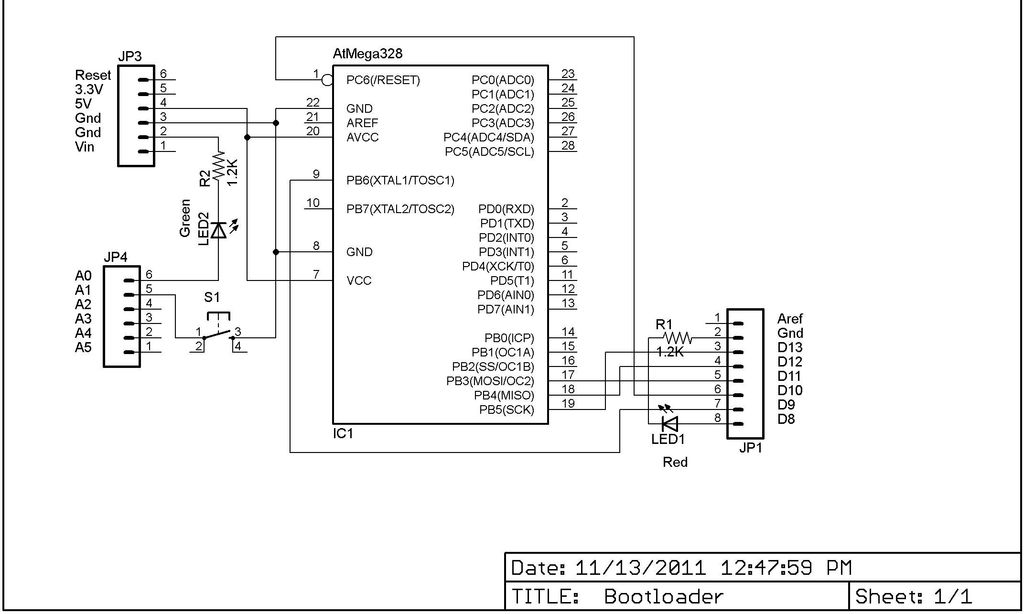
This Lazy Old Geek is also an Arduino enthusiast. One of the common microcontrollers used by Arduinos is the Atmega328 chip. To utilize Arduino software, the Atmega must be equipped with bootloader software. There is a notable difference between...
This is an attempt to create a simple and compact photovore. Although it may not be visually appealing, it serves as a good starting point for beginners. It is a personal version of the Dozer photovore. The latest robot...
DAC stands for Digital to Analog Converter. This article explores the code created by Michael Smith for a PWM-based DAC. The code has been modified to allow for experimentation with various DAC options. A comparison is made between the...

The core component of this digital volume controller (DVC) circuit is the IC2 4067, which is a 16-channel analog multiplexer. A 1kΩ resistor is connected between each input and output, allowing the multiplexer to function similarly to a potentiometer....