
NAVAL SONAR
No description available.
Related Circuits
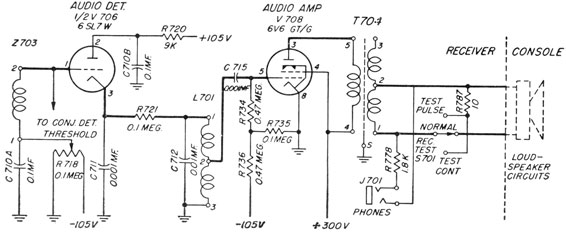
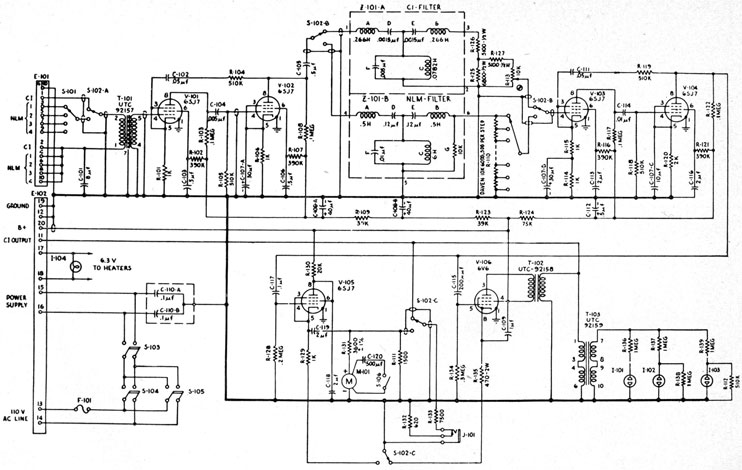
The receiving systems used with scanning-type echo-ranging equipment are dual-channel systems, which are essential in current video portrayal methods. Deviation indicators, which can be cathode-ray tubes or galvanometers, utilize either a sum-and-difference or a comparison receiving system. These systems...
A simple ultrasonic parking sonar electronic project can be designed using this schematic circuit. This ultrasonic parking sonar project features an adjustable detection range from 5 cm to 1.5 meters and a detection angle of 5 degrees. The circuit...
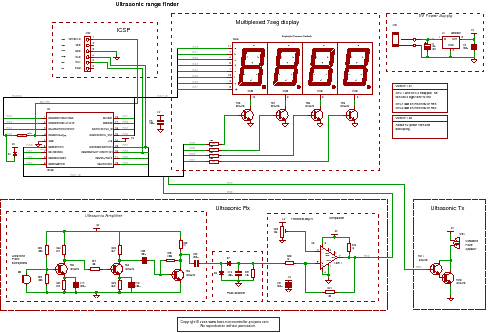
For the PIC sonar range finding project, a PIC microcontroller is ideal. It has a capture timer that can accurately measure the ultrasonic echo time, allowing for the calculation of the distance from the object. The PIC microcontroller serves as...
In the past, depth measurement of the sea bottom was performed using a "bullet," which was a heavy lead object lowered into the water from a calibrated rope. When the bullet reached the seabed, the depth could be read...
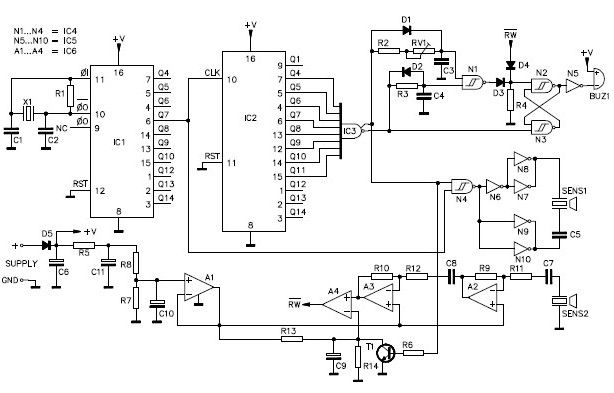
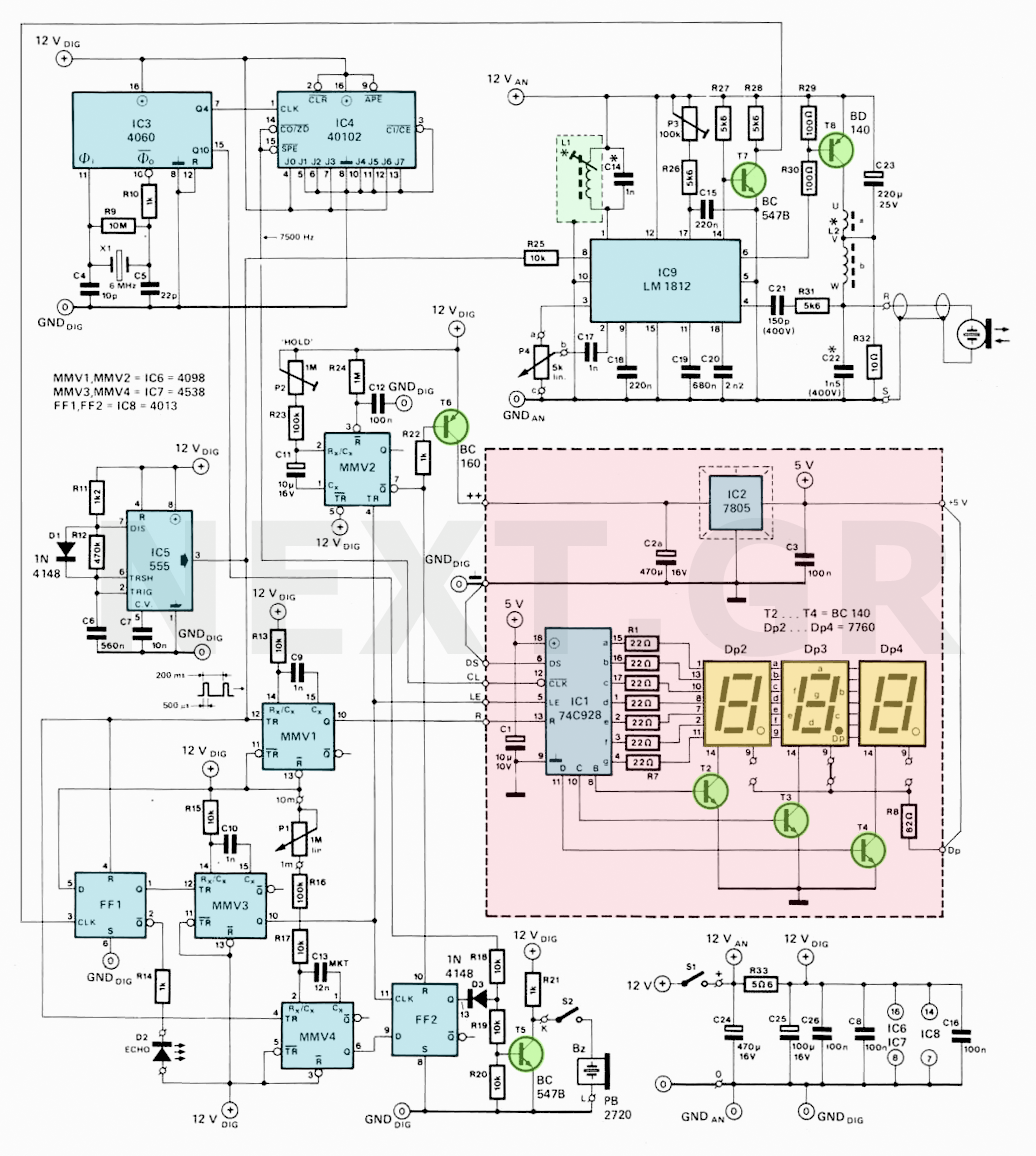
This circuit has an automatic switch on for the rear gear, a LED bar graph display, and an audible beep on the last LED. It features a "good old" design style with no microcontrollers. Based on an ultrasonic amplifier...
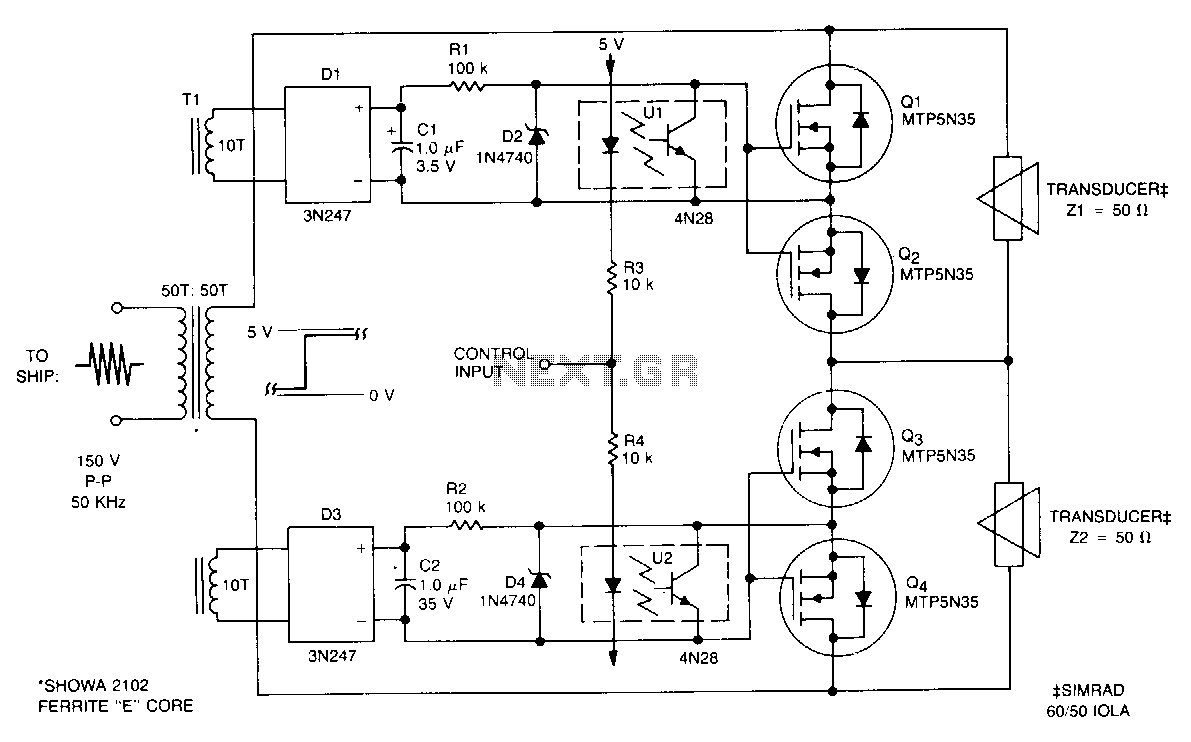
This submersible sonar positioning apparatus primarily comprises dual-opposed ultrasonic transducers that are alternately excited, with the return signals processed and displayed for observation and measurement. Typical transmitter frequencies range from 50 to 200 kHz, and pulse widths can be...