
Robotrex Robotic Dinasaur
The robot is equipped with two independent condenser microphone sensors for sound detection, enabling it to differentiate sounds from the left and right. A photodiode light sensor at the front measures ambient light levels as a 5-bit value. Additionally, an infrared obstacle detection system, utilizing a microprocessor-based OZZ-IR-DIS chip, allows the Robotrex to identify obstacles within a range of approximately 40 cm. A 5x7 dot matrix LED display serves as a "Mood" display, capable of showcasing various facial expressions (16 total) while the main processor generates sound effects for enhanced interaction. The Robotrex can be powered by three microcontrollers or a single main controller, which would limit its capabilities. The structural components can be made from plywood, mock-up plastics, or sheet aluminum, with organic forms achieved through polyurethane foam and finishing techniques.
The Robotrex project represents an innovative approach to robotic design, integrating advanced engineering principles with user-friendly features. The internal servo arrangement not only improves the visual appeal of the robot but also enhances its mechanical performance. By strategically placing the servos and optimizing the power transfer methods, the design achieves a higher degree of stability and responsiveness compared to its predecessors.
The sound sensors allow for real-time environmental interaction, enabling the Robotrex to respond to auditory stimuli. The light sensor enhances the robot's ability to navigate and react to varying lighting conditions, making it more adaptable to different environments. The infrared obstacle detection system is crucial for autonomous navigation, allowing the robot to avoid potential collisions and navigate complex terrains.
The mood display feature adds an interactive dimension to the Robotrex, allowing it to convey emotions and engage with users on a more personal level. The integration of sound effects further enriches the communication capabilities of the robot, making it a more engaging companion.
Overall, the Robotrex is a sophisticated robotic dinosaur that combines aesthetic design with functional engineering, making it a notable project in the field of robotics. The careful consideration of structural improvements, power efficiency, and user interaction elements demonstrates a comprehensive understanding of robotic systems and their applications.Here is our robotic project; Robotrex. A robotic dinosaur. Its name comes from the words "Robot" and "tyrosaurus-Rex". Inspired from our older projects "Bigfoot" and "the Goggles", this project was built specially for our endtas. com fair stand in 2004 Izmir international fair. Instead of forgetting it around somewhere under dust i worked on a plyw ood cutting plan and a computer model of it to share the project with our visitors. The Robotrex uses the walking principle of the "Bigfoot". But along with the placing of servos to its foot shape and the center of gravity, it has got some important structural improvements which are the results of a careful study which took several days of time before the fair. Just like the Bigfoot, this robot is also powered by two servos. But with one big difference instead of the servo placing scheme of the Bigfoot where the servos were looking towards the outside of the body, (with links also outside) this robot has them all inside the body.
The power transferring parts are also placed between the legs, inside the body almost completely hidden. The feet-up-down servo is placed at the back, facing the inside of the robot-body where it used to sit in the front of Bigfoot facing forward.
The feet-forward-reward servo is placed at the front bottom, facing backwards into the robot-body where it used to sit at the rear part of The Bigfoot facing down. Where the power of the feet-forward-reward servo is transferred to the legs by means of a iron wire, in Robotrex, a rigid plywood piece is used for the same purpose.
And this concludes to a robot which moves more determinently with better balance. The power of the feet-up-down servo is transferred not to the tip of the feet like it is in the Bigfoot but to the mid part of the feet resulting a much more stable standing robot. By means of the improvements like this and a much better center of gravity, the power of the servos are transferred to the legs and ground with more efficiency resulting less power loss due to structure.
This also yields a longer battery life. The robotrex can run for hours with its 4 rechargeable AA batteries. a- Two sound sensors. Independent two condenser microphone sensors at the right and left. With these sensors, the robot can hear the sounds around it and also differentiate between sounds coming from the left side and right side. b- Light sensor. This is a photodiode located at the front of the Robotrex facing forward. With this sensor, the robot can sense and measure the light level around it as a 5 bit (0-31) value. c- Infra Red (IR) obstacle detection. With this microprocessor based (OZZ-IR-DIS chip) dedicated circuitry Robotrex can sense the obstacles on its way as well as obstacles at the right and left sides within a limit of almost 40cms.
Along with the sensors, the Robotrex has got a "Mood" display consisting of a 5x7 dot matrix LED display where it can display its mood as smiling, crying, scary etc faces (16 total). The mood display can also be built and used as a stand-alone module. While the mood display is showing the emotions of the robot the main processor can also produce a variety of sound effects to improve the communication of the robot with the outer world.
The Robotrex which is powered by three separate microcontrollers, can also be built by using only one micro, the main controller. In this scheme there wil be no mood display and no IR obstacle detection. Moods can be expressed by sounds only and obstacles can be detected by the whisker type touch sensors like we use in our robugs and in Bigfoot.
As the structure, you can use plywood for making the parts as well as mock-up plastics, sheet aluminium etc. You can give organic forms over the finished structure by using polyurethane foam and obtain a smooth surface by sanding and finalizing the shape by applying steel putty & resanding.
With these, the robot can become a better looking dinasaur or 🔗 External reference
Related Circuits
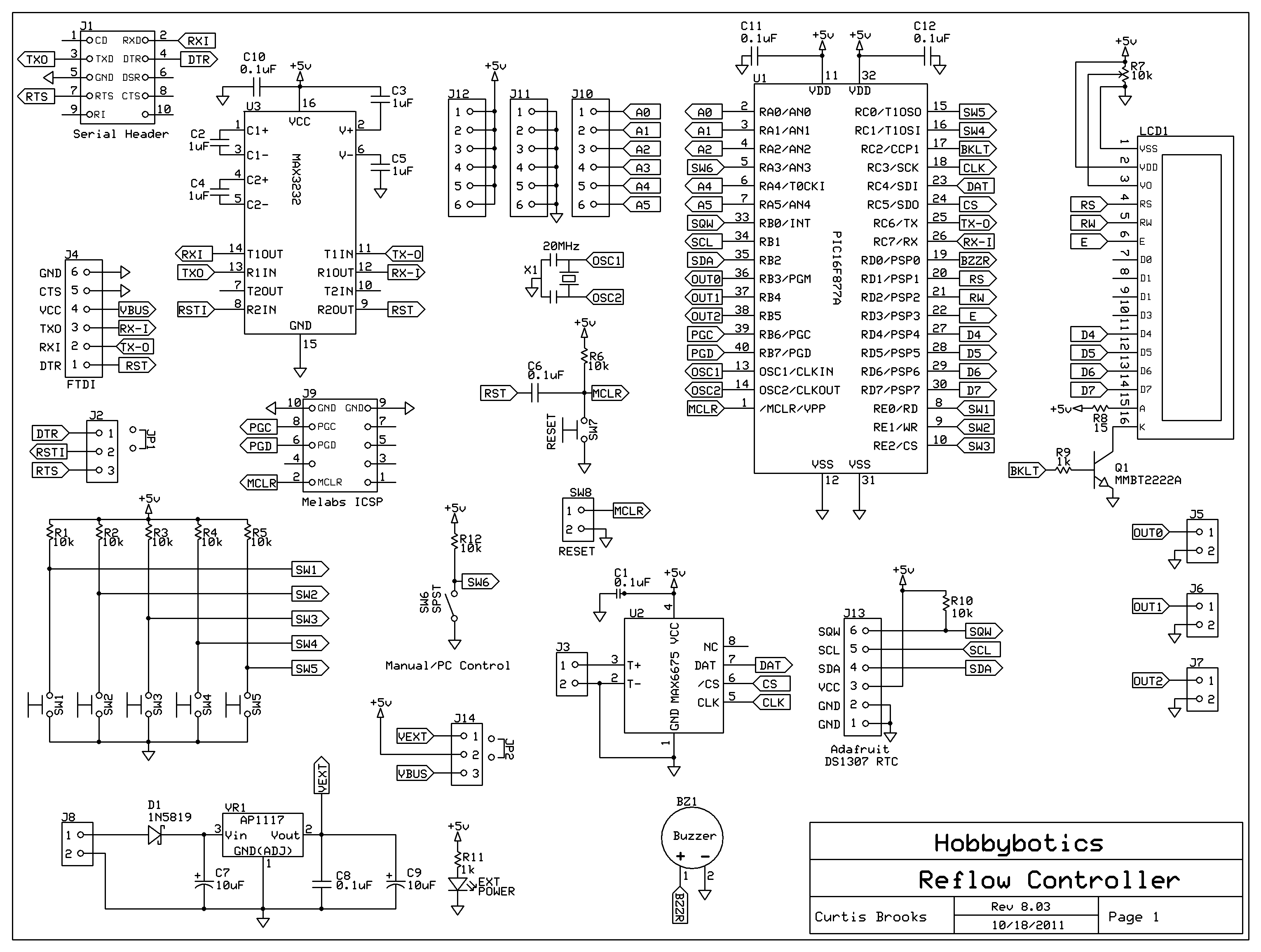
Introduction to the Reflow Process and PID Controller Circuit Documentation. This document discusses the benefits of using Surface Mount Devices (SMD) in circuit design, highlighting advantages such as reduced size and cost compared to traditional through-hole components. The reflow soldering...
This is an attempt to create a simple and compact photovore. Although it may not be visually appealing, it serves as a good starting point for beginners. It is a personal version of the Dozer photovore. The latest robot...
With a handful of inexpensive components, a little creativity, and the power of PicBasic, you can build some pretty outstanding robotics creations as Rob Arnold proves with his Ruf-Bot project. RF remote control is just way too cool not...
The TINAH board shield is a printed circuit board designed for the Phys253 course, first utilized in 2009 by Engineering Physics students and faculty. This shield functions as a buffer to protect the digital and analog inputs and outputs...
The principles of DC motors are discussed in the beginner and intermediate sections of this tutorial. This section will address the electronics required to interface them with a Basic X microcontroller or other digital chips. The simplest method of...
The PhytoBot is a semi-intelligent plant that reacts to external stimuli, specifically light intensity and light location, mimicking the behavior of a phototropic plant. It is designed as an interactive artwork intended for prolonged operation. The motivation behind this...
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713